統合化技術
 アームロボットによるカラーボールのお片づけ
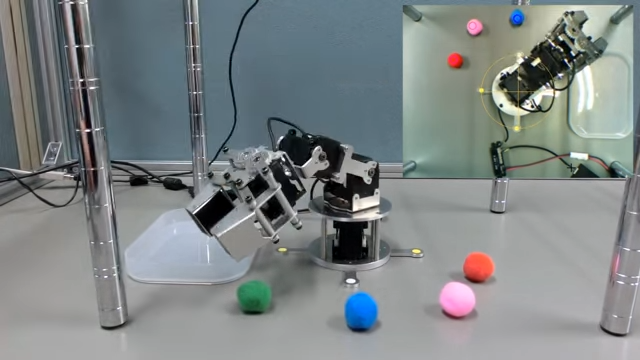
アームロボットによるカラーボールのお片づけ
知能システム、いわゆるロボットは様々な要素技術を統合しなくては構築できません。我々の研究室ではそのようなシステム統合を強く意識しながら研究を行っています。たとえばロボット用コンポーネント技術の世界標準に基づくRTミドルウェアであるOpenRTMや、移動ロボット研究で広く用いられているSSM (Sensor Sharing Manager)などを積極的に利用して構造が明確で再利用しやすいシステ ム構築を行っています。また単にそれらを利用するだけでなくミドルウェアや必要なツールの研究開発や、標準化への貢献も行います。 また知能ロボットが作業(移動を含め)を行うために必要な動作(技能、スキル)を体系立てて研究を行うことで、単に一つの動作をするロボットできたということではなく、ロボットや作業が異なっていても作業ができる再利用性の高い技術として提供することを目指しています。