形態変化する登攀ロボット
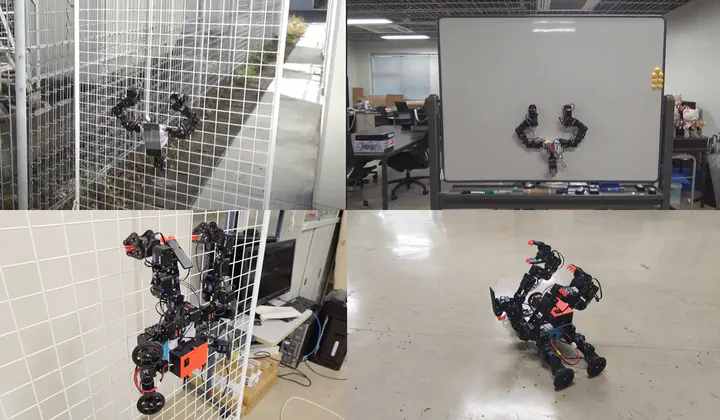
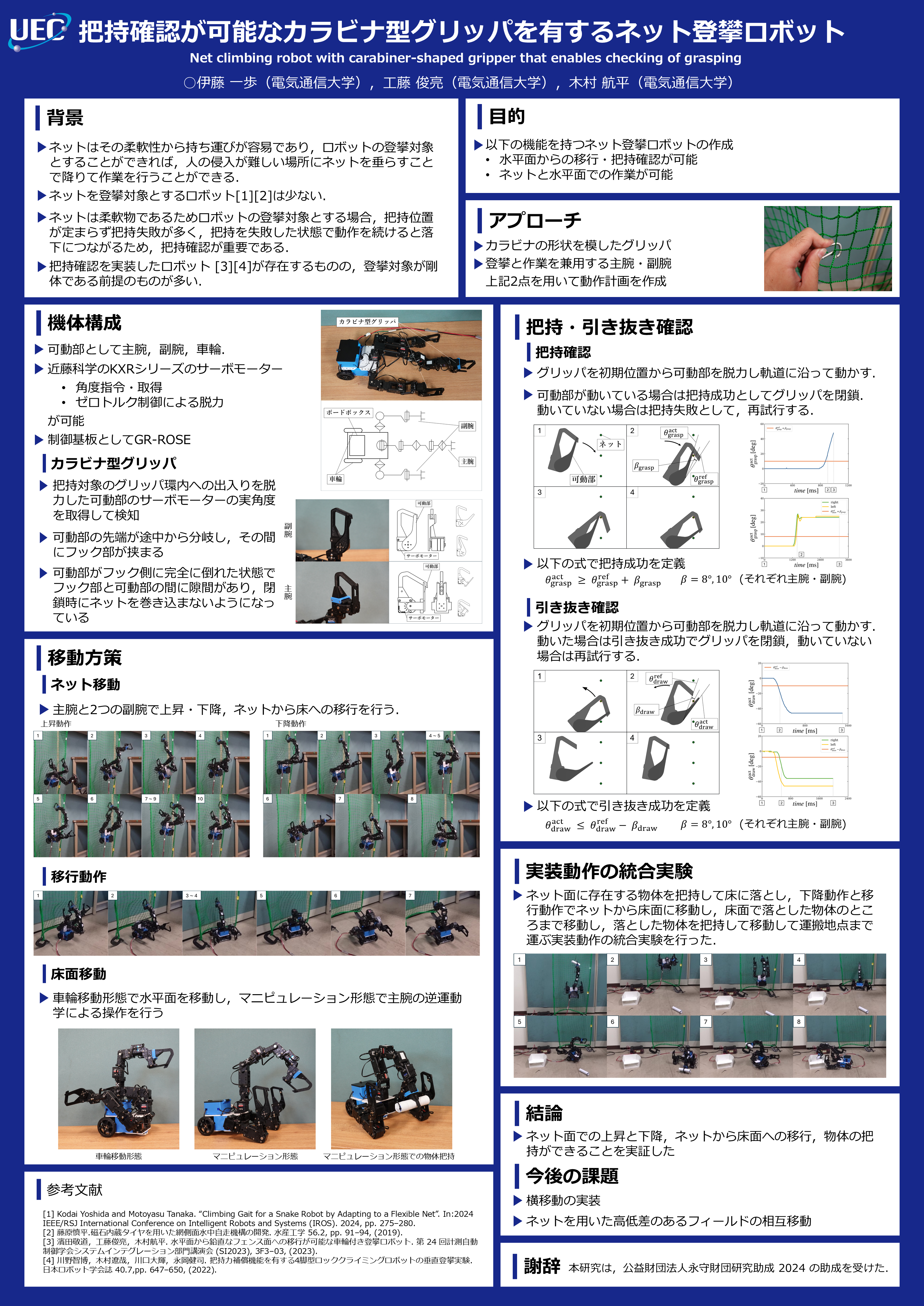
壁面や梯子を移動するロボットは今日、災害等の現場や日常生活での活用が期待されています。例えば、人間では侵入することの難しい壁面に沿って移動して物資を提供したり、フェンスなどにロボットを設置することで設備の定期点検なども可能です. 本研究では,同一機体でエンドエフェクタをグリッパと吸盤に形態変化させることで,グリッパ把持によるフェンスの登攀・吸盤吸着による壁面の登攀を実現するロボットについて研究しています.
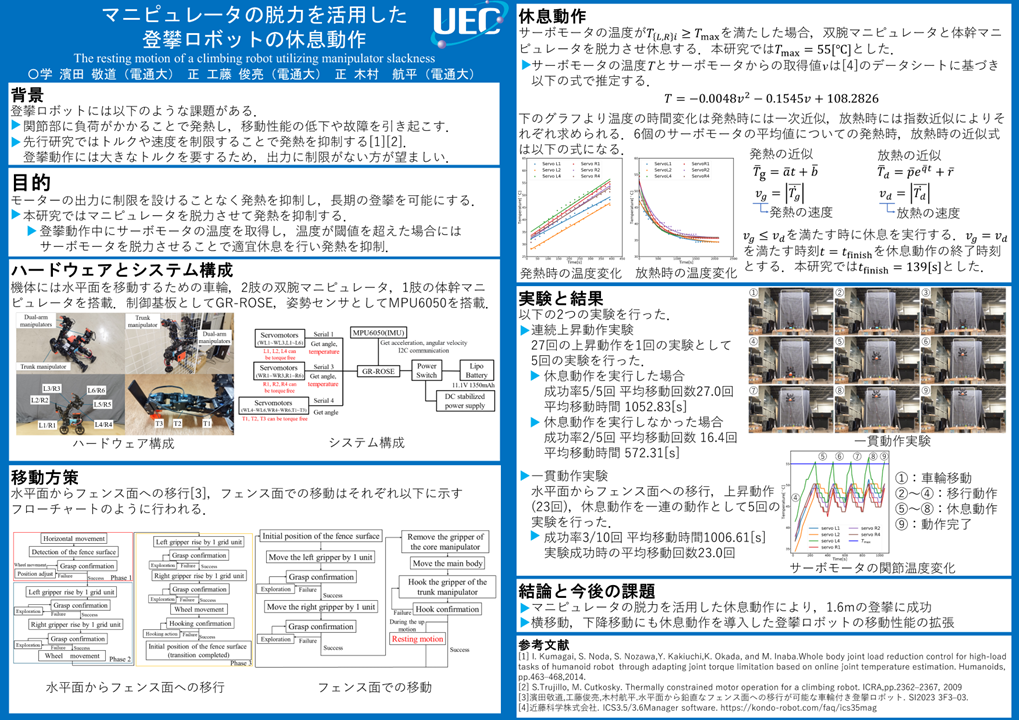
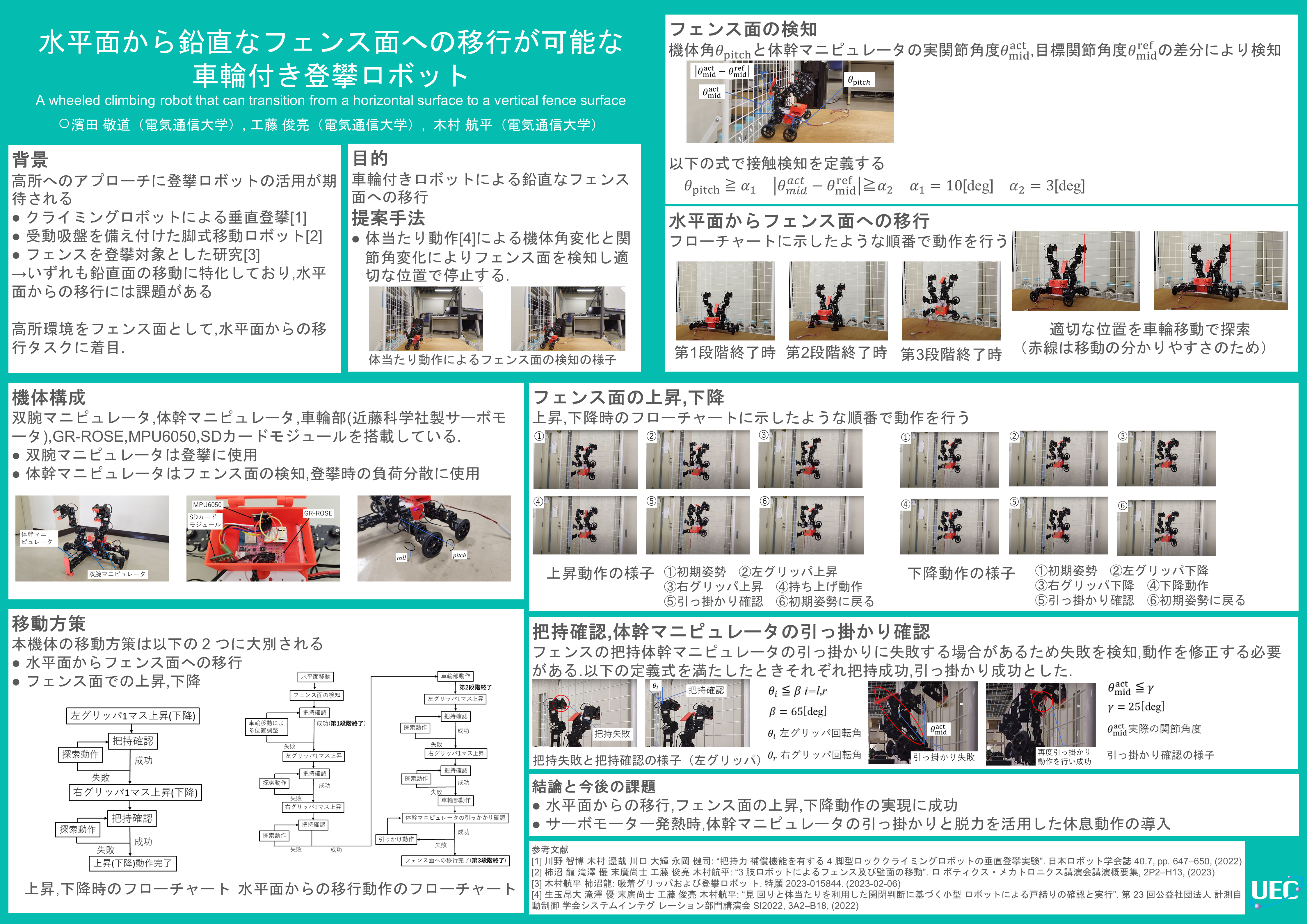
上記の 3 肢ロボットは鉛直面のみしか移動できないという課題があります.また登攀ロボットは関節部が発熱し,故障や破損が発生するという課題もあります. そこで本研究では同一機体で異なる移動形態に変化する車輪付き登攀ロボットにより水平面から鉛直なフェンス面への移行,登攀および温度上昇時の休息に関する研究を行っています.同一機体で移動することで単にコストを軽減するだけでなく、フェンスと壁面が混在するような現場で活動することが可能であると考えられます。また3肢のロボットを用いることで2肢のロボットより汎用性を向上させ、4、6肢のロボットより接地面からの影響を減らし、移動の計画を簡略化することが出来ます。
これらの研究により登攀ロボットは同一機体で複数の環境での移動,負荷により関節が発熱した場合でも休むことで登攀タスクを継続できる点など,移動性能を向上させることができるようになります.
動画
フェンス上での移動
壁面上での移動
屋外実験
屋外実験(別アングル)
水平面からフェンス面への移行+休息動作を活用した登攀
研究ポスター
関連文献
-
伊藤 一歩, 工藤 俊亮, 木村 航平. 把持確認が可能なカラビナ型グリッパを有するネット登攀ロボット. 第25回計測自動制御学会システムインテグレーション部門講演会 (SI2024). 2B4-05. 2024.
-
木村 航平. 形態変化する登攀ロボット. 日本ロボット学会誌, Vol. 42 No. 7 pp. 636-641, 2024.
-
濱田 敬道, 工藤 俊亮, 木村 航平. マニピュレータの脱力を活用した登攀ロボットの休息動作. 日本機械学会ロボティクス・メカトロニクス講演会2024 (ROBOMECH2024). 2P1-M09. 2024.
-
濱田 敬道, 工藤 俊亮, 木村 航平. 水平面から鉛直なフェンス面への移行が可能な車輪付き登攀ロボット. 第24回計測自動制御学会システムインテグレーション部門講演会 (SI2023), 3F3-03. 2023.
-
柿沼 龍, 滝澤 優, 末廣 尚士, 工藤 俊亮, 木村 航平. 3肢ロボットによるフェンス及び壁面の移動. 日本機械学会ロボティクス・メカトロニクス講演会2023 (ROBOMECH2023), 2P2-H13. 2023.
-
木村 航平,柿沼 龍.吸着グリッパおよび登攀ロボット.特願2023-015844.2023/02/06.