


電気通信大学 工藤・木村研究室
実世界で,人の役に立つ,人と協調する,人を楽しませる,ロボットの研究.
Projects


Recent Publications
発表文献をフィルタリングすることで,関連するコンテンツを素早く発見することができます.
(2025).
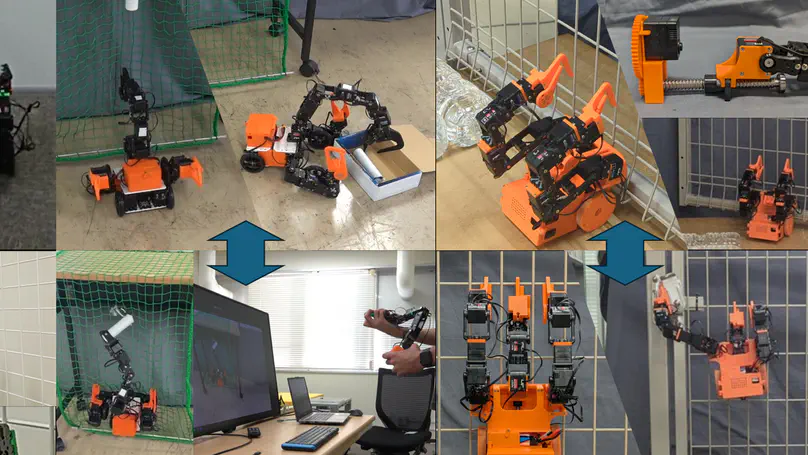
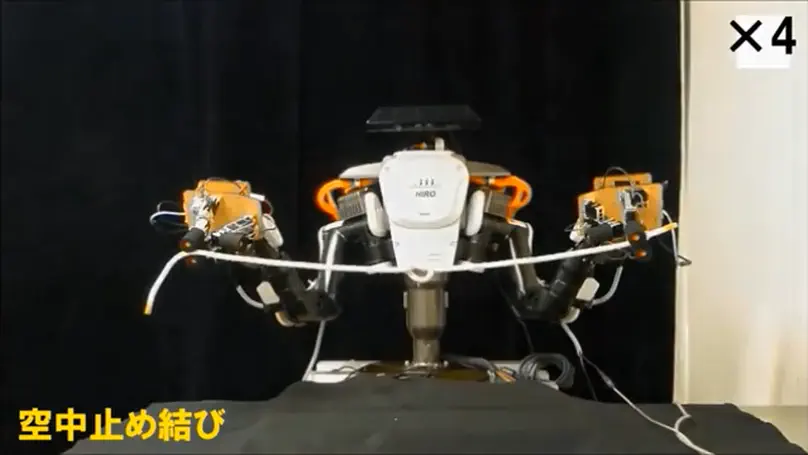
ネット登攀ロボットのネット面でのバイラテラル制御による物体把持.
第26回計測自動制御学会システムインテグレーション部門講演会 (SI2025).
(2025).
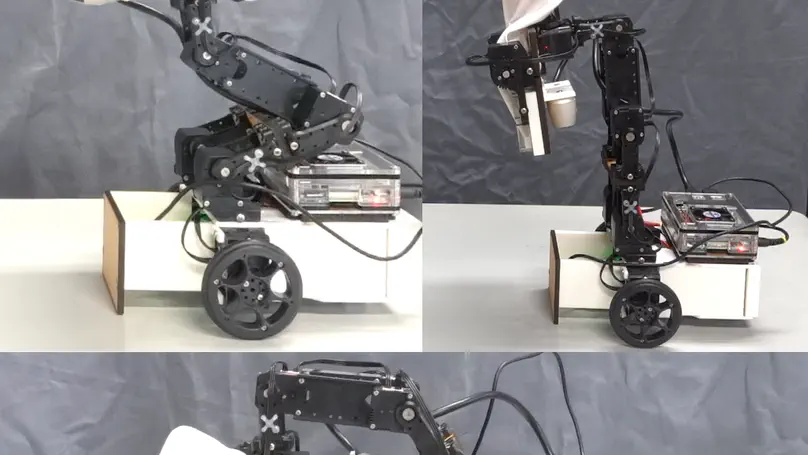
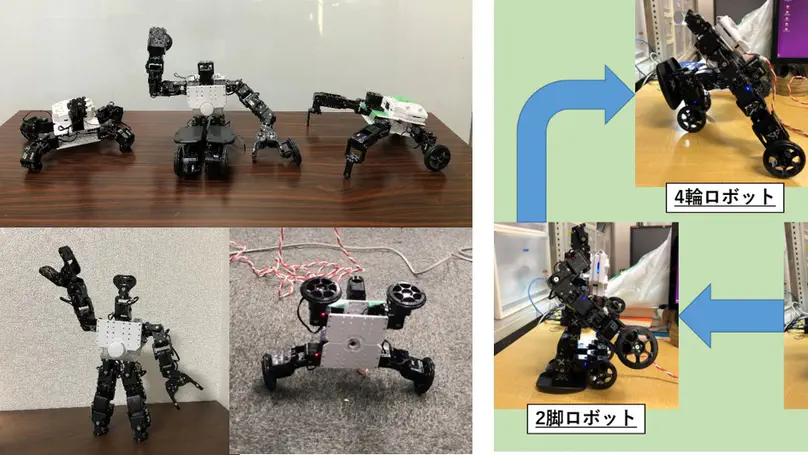
転倒に対する運搬物の保護が可能な車輪変形型ヒューマノイドの衝撃緩和と復帰戦略.
第26回計測自動制御学会システムインテグレーション部門講演会 (SI2025).
(2025).
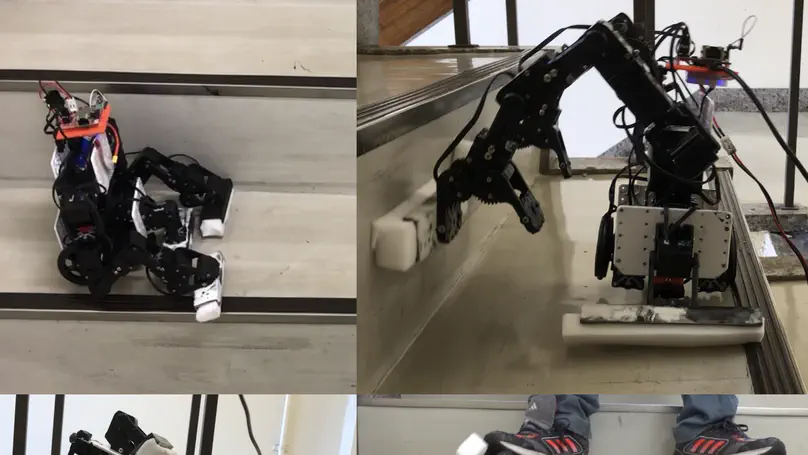
Transformable Robot with Suction Cup Assisted Grippers for Climbing Fences and Walls.
2025 IEEE International Conference on Robotics and Biomimetics (ROBIO).
Access
住所
〒182-8585
東京都調布市調布ヶ丘1-5-1 東2号館 5・6階
電気通信大学 大学院情報理工学研究科
情報学専攻 工藤・木村研究室
交通・学内マップ
工藤 s-kudoh (a) uec.ac.jp
木村 kimura (a) uec.ac.jp