袋付きマニピュレータを備えた片付けロボット

本研究では,袋を取り付けたマニピュレータを開発し,それを備えた移動ロボットによる片付けに取り組んでいます.
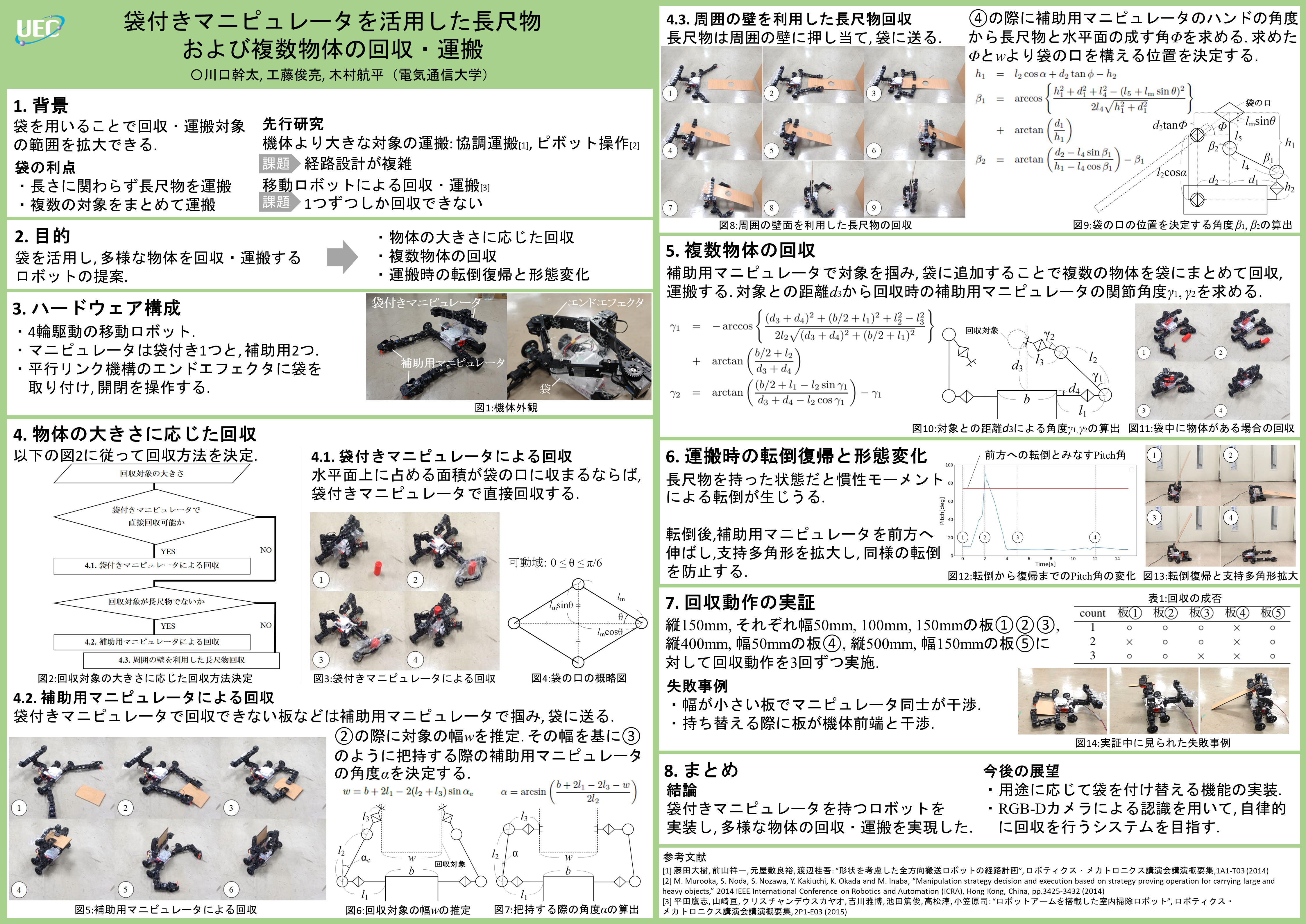
袋付きマニピュレータを備えた移動ロボットによって「1. 複数物体を片付ける.2. 長尺物を片付ける.3. 狭隘空間にある対象を回収する.」といったタスクを同一機体で実現します.
動画
袋付きマニピュレータのみでの回収
板材の回収
長尺物の回収
狭隘空間でのタスク継続
支持多角形の拡大による転倒の再発防止
複数物体の片付け
研究ポスター
関連文献
- 川口 幹太, 工藤 俊亮, 木村 航平. 袋付きマニピュレータを活用した長尺物および複数物体の回収・運搬. 第24回SICEシステムインテグレーション部門講演会講演概要集. 2023. 3G5-01