


電気通信大学 工藤・木村研究室
実世界で,人の役に立つ,人と協調する,人を楽しませる,ロボットの研究.
Projects



Recent Publications
発表文献をフィルタリングすることで,関連するコンテンツを素早く発見することができます.
(2025).
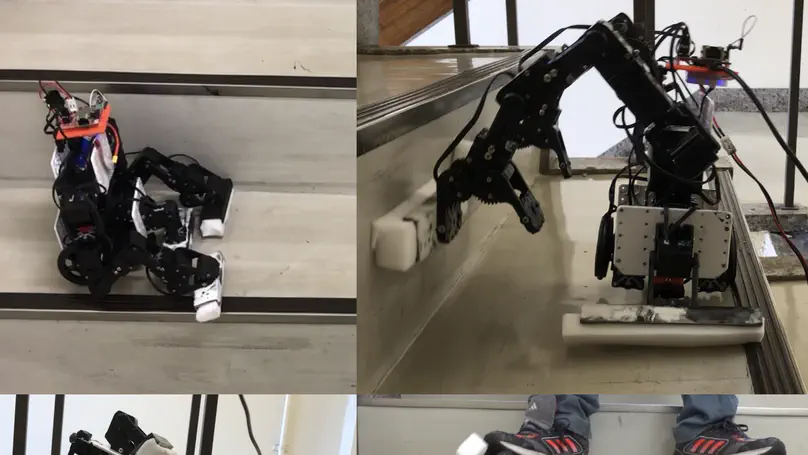
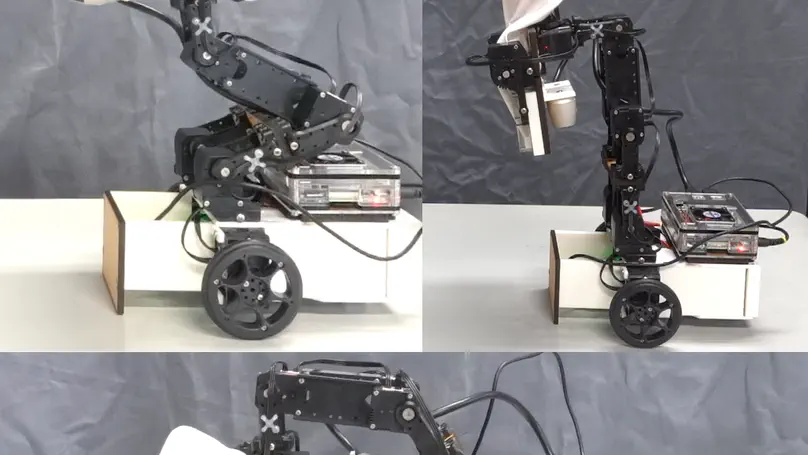
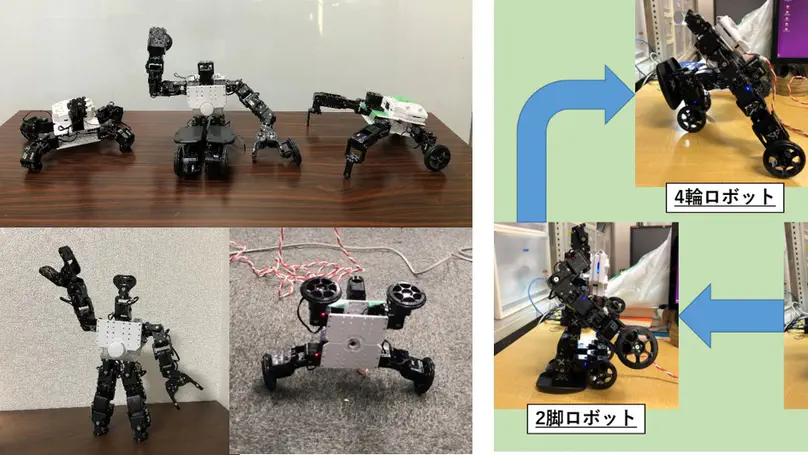
肩部に備えた車輪で転倒時の衝撃緩和を図る車輪移動変形型ヒューマノイド.
日本機械学会ロボティクス・メカトロニクス講演会2025 (ROBOMECH2025).
(2025).
双腕ロボットによるゴミ袋のゴミ箱への取り付け動作.
日本機械学会ロボティクス・メカトロニクス講演会2025 (ROBOMECH2025).
(2025).
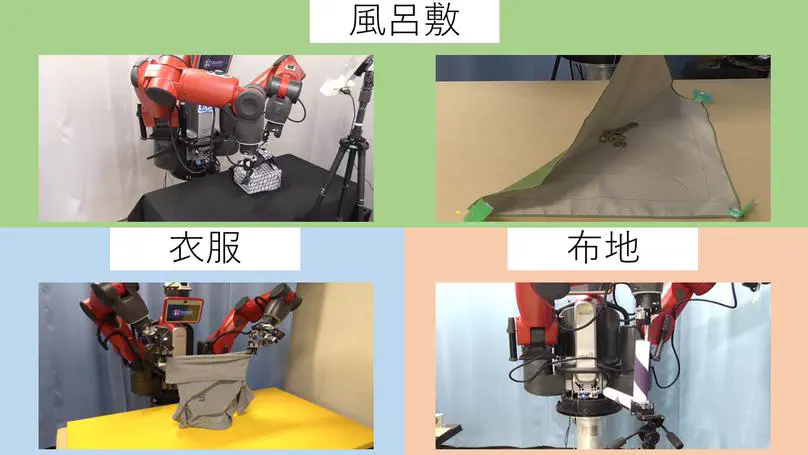
双腕ロボットによる衣服の裏返し作業.
日本機械学会ロボティクス・メカトロニクス講演会2025 (ROBOMECH2025).
Access
住所
〒182-8585
東京都調布市調布ヶ丘1-5-1 東2号館 5・6階
電気通信大学 大学院情報理工学研究科
情報学専攻 工藤・木村研究室
交通・学内マップ
工藤 s-kudoh (a) uec.ac.jp
木村 kimura (a) uec.ac.jp