Tidying up robot equipped the manipulator with bag
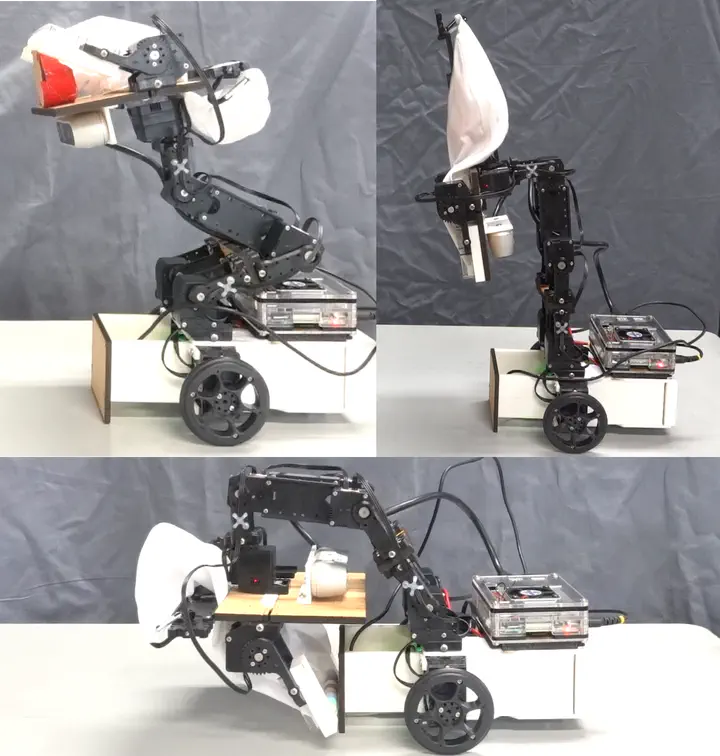
This study have been developing a bag-mounted manipulator and working on tidying up by mobile robot equipped with the manipulator.
We have been developing and improving hardware and software of the bag-mounted manipulator. This aims to realize following tasks by the single manipulator.
- Tidying up objects which have various size or form.
- Tidying up multiple objects simultaneously.
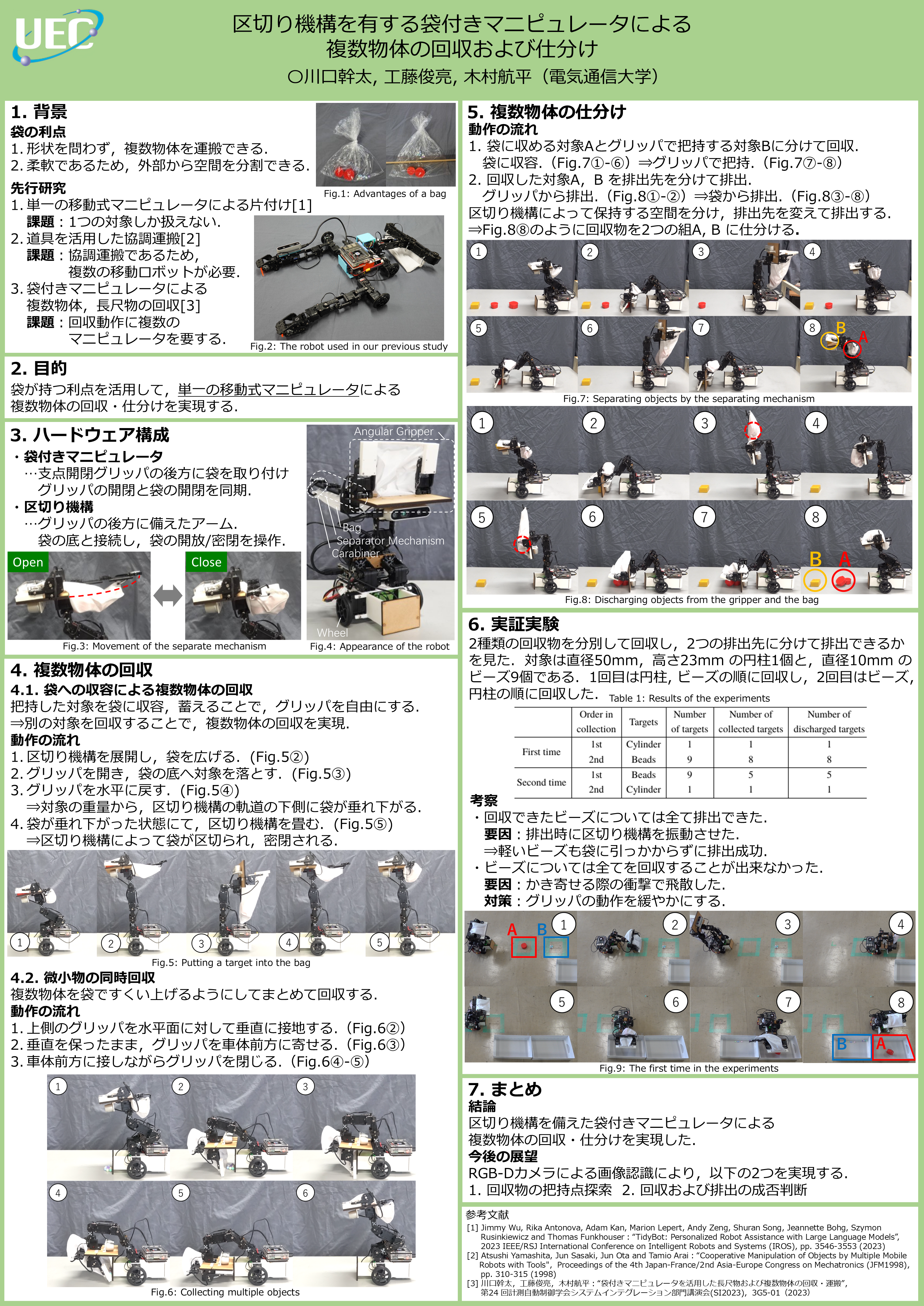
- Separation of multiple objects.
Videos
After December 2025
Task time comparison in tidying 6 screws
Gather small objects
Regrasp small objects
Regrasp a long object
Before December 2025
Collect small objects
Separate multiple objects
Before March 2024
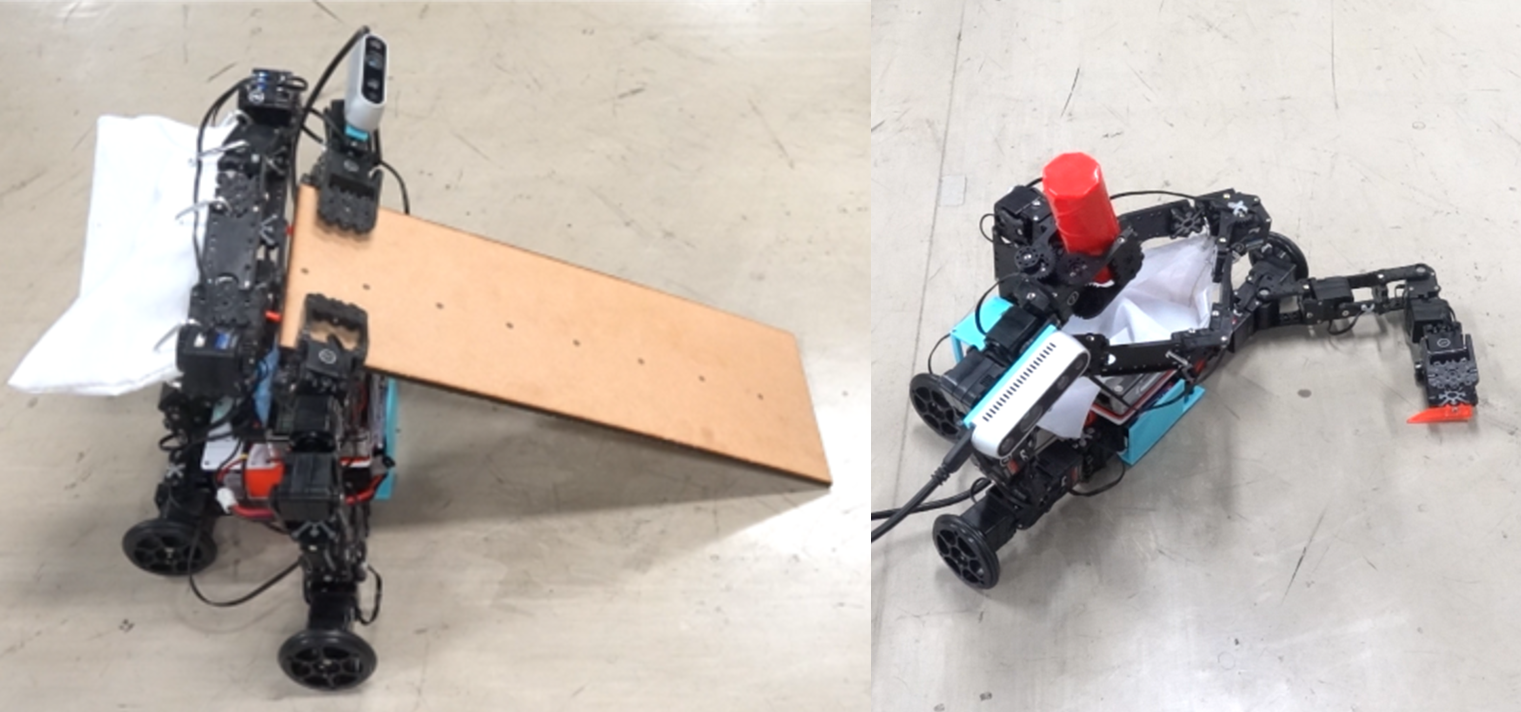
Collect by manipulator with bag
Collect board
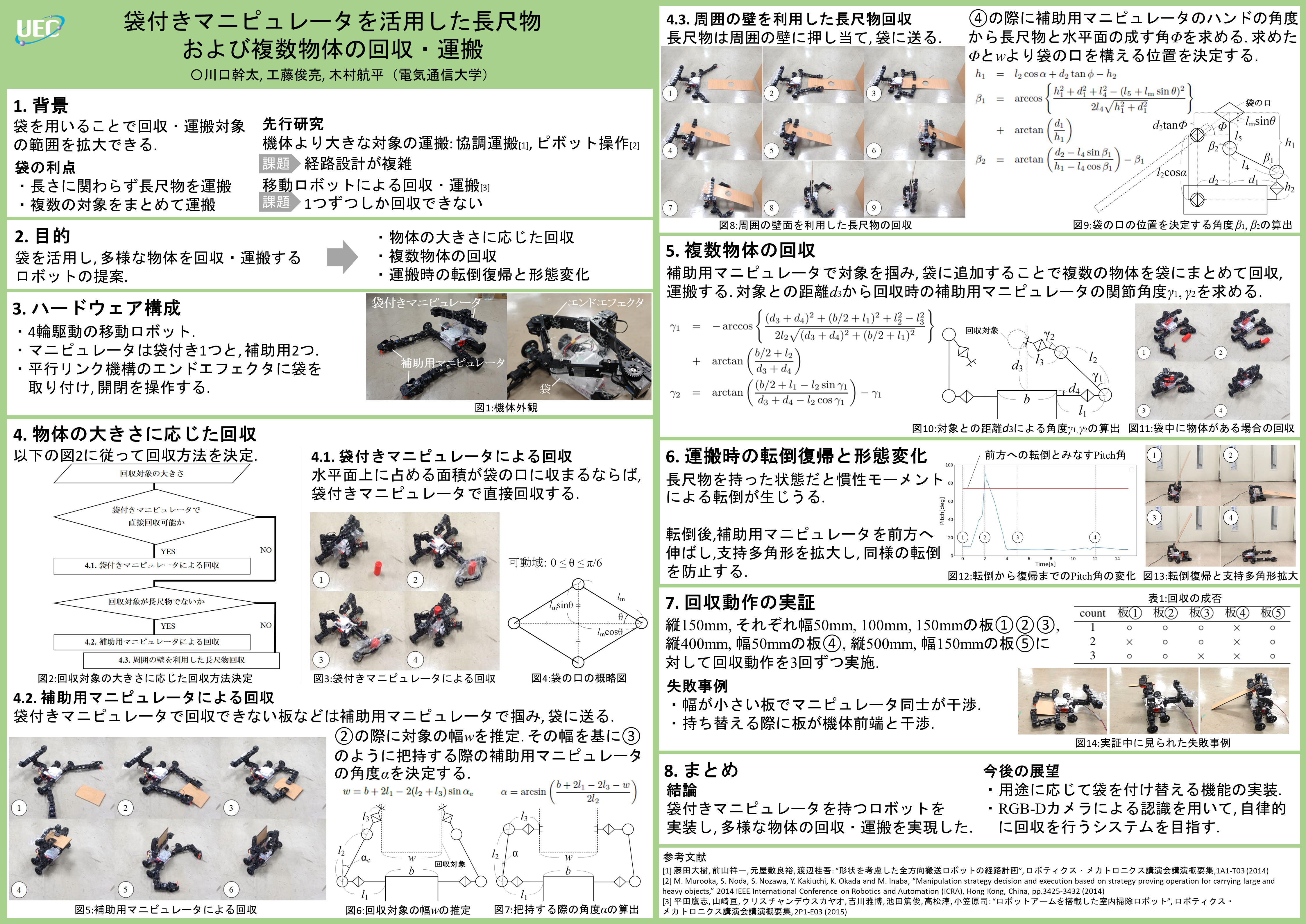
Collect long object
Continue task in a space has a low ceiling
Prevent turnover repeatly by extending the support polygon
Tidying up multiple objects
Research poster (in Japanese)
Related works
-
Kanta Kawaguchi, Shunsuke Kudoh and Kohei Kimura. Tidying up multiple objects and long object by compact-size mobile robot equipped the manipulator with a bag. Transactions of the Society of Instrument and Control Engineers. Vol.61 No.1 pp.18-31
-
Kanta Kawaguchi, Shunsuke Kudoh and Kohei Kimura. Collection and separation of multiple objects by the manipulator equipped with a bag and the separating mechanism. 25th SICE System Integration Division Annual Conference (SI2024). 2024. 1B7-02
-
Kanta Kawaguchi, Shunsuke Kudoh and Kohei Kimura. “Collection / transportation for a long object and multiple objects by using the manipulator with a bag”. 24th SICE System Integration Division Annual Conference (SI2023). 2023. 3G5-01