Integration Technology
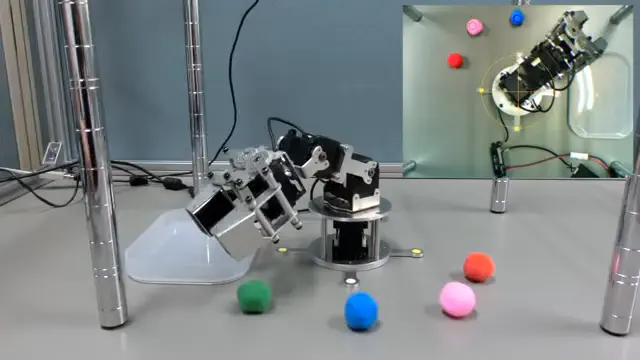 Cleaning up colored balls by robot
Cleaning up colored balls by robot
Intelligent systems, so-called robots, cannot be constructed without integrating various elemental technologies. In our laboratory, we are conducting research with a strong awareness of such system integration. For example, we are actively using OpenRTM, an RT-middleware based on the global standard for robot component technology, and SSM (Sensor Sharing Manager), which is widely used in mobile robot research, to build a system with a clear structure that is easy to reuse. We are building a system that has a clear structure and is easy to reuse. In addition, we are not only using these tools, but also researching and developing middleware and necessary tools, as well as contributing to standardization. In addition, by conducting systematic research on the motions (skills) required for intelligent robots to perform tasks (including movement), we aim to provide highly reusable technology that enables robots to perform tasks even if the robots and tasks are different, rather than simply creating robots that perform a single motion.