


UEC Kudoh and Kimura Laboratory
Research on robots that are useful to people, cooperate with people, and entertain people in the real world!
Projects


Recent Publications
Quickly discover relevant content by filtering publications.
(2026).
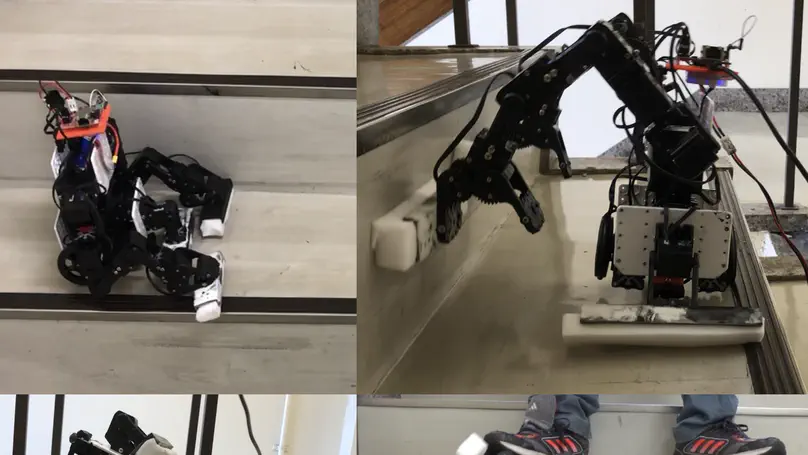
Compact Stair Cleaning Robot Equipped with Manipulators for Cleaning Treads, Risers, and Stair Nosings.
2026 JSME Conference on Robotics and Mechatronics (ROBOMECH2026).
(2026).
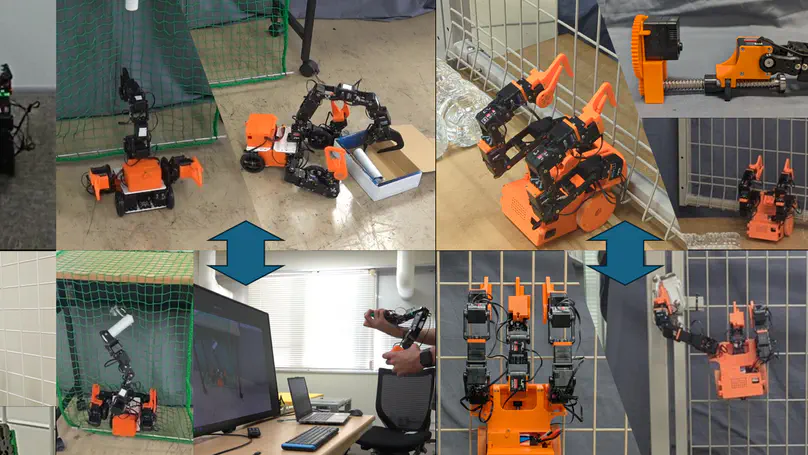
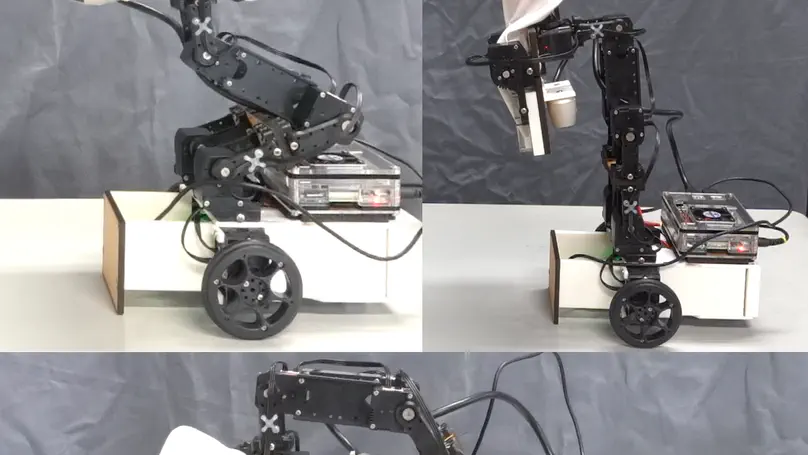
Fence gate opening by a climbing robot equipped with a feed screw mechanism.
2026 JSME Conference on Robotics and Mechatronics (ROBOMECH2026).
(2026).
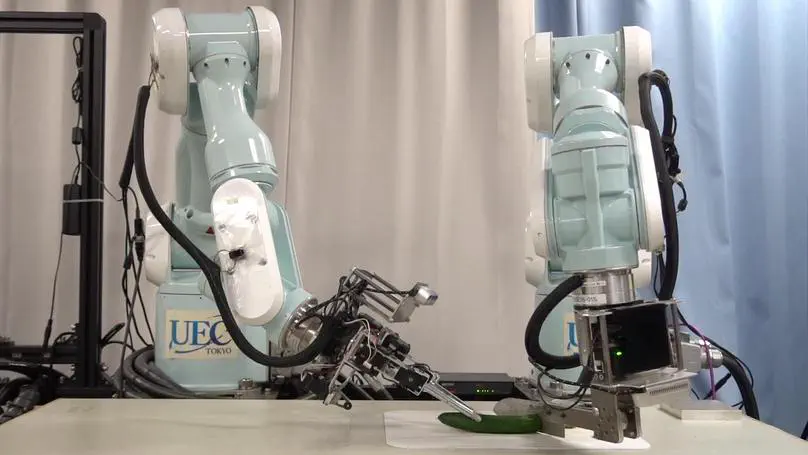
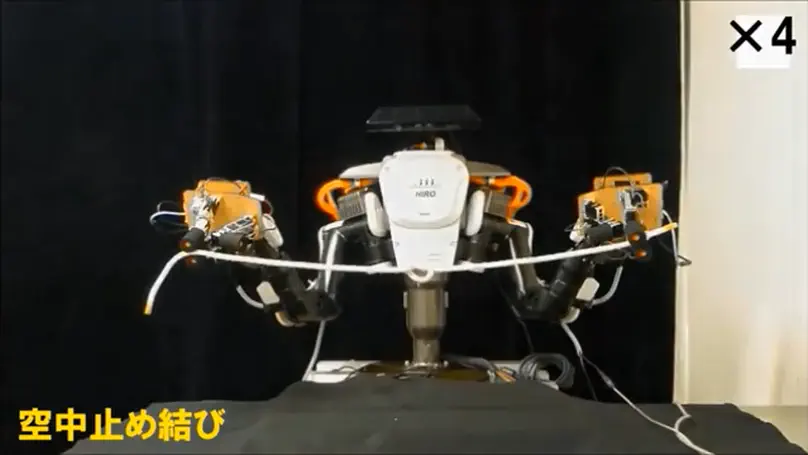
Firm Tying Operation by Dual-arm Robot Using the Object’s Corners.
2026 JSME Conference on Robotics and Mechatronics (ROBOMECH2026).
Access
Address
Kudoh and Kimura Laboratory,
Department of Informatics,
Graduate School of Informatics and Engineering,
The University of Electro-Communications
Building East-2, 5th and 6th floor,
1-5-1 Chofugaoka, Chofu City, Tokyo, 182-8585, Japan
Access Map
Kudoh: s-kudoh (a) uec.ac.jp
Kimura: kimura (a) uec.ac.jp