Manipulation Systems
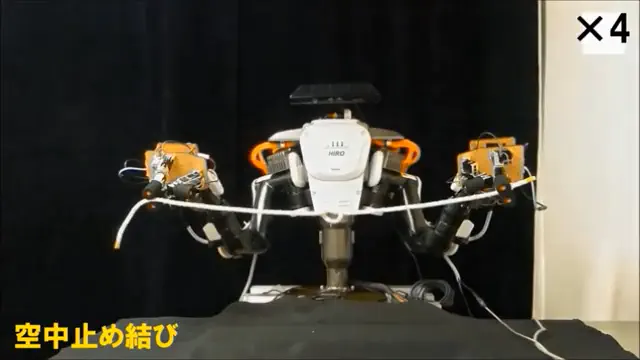 String Tying Motion by Manipulator
String Tying Motion by Manipulator
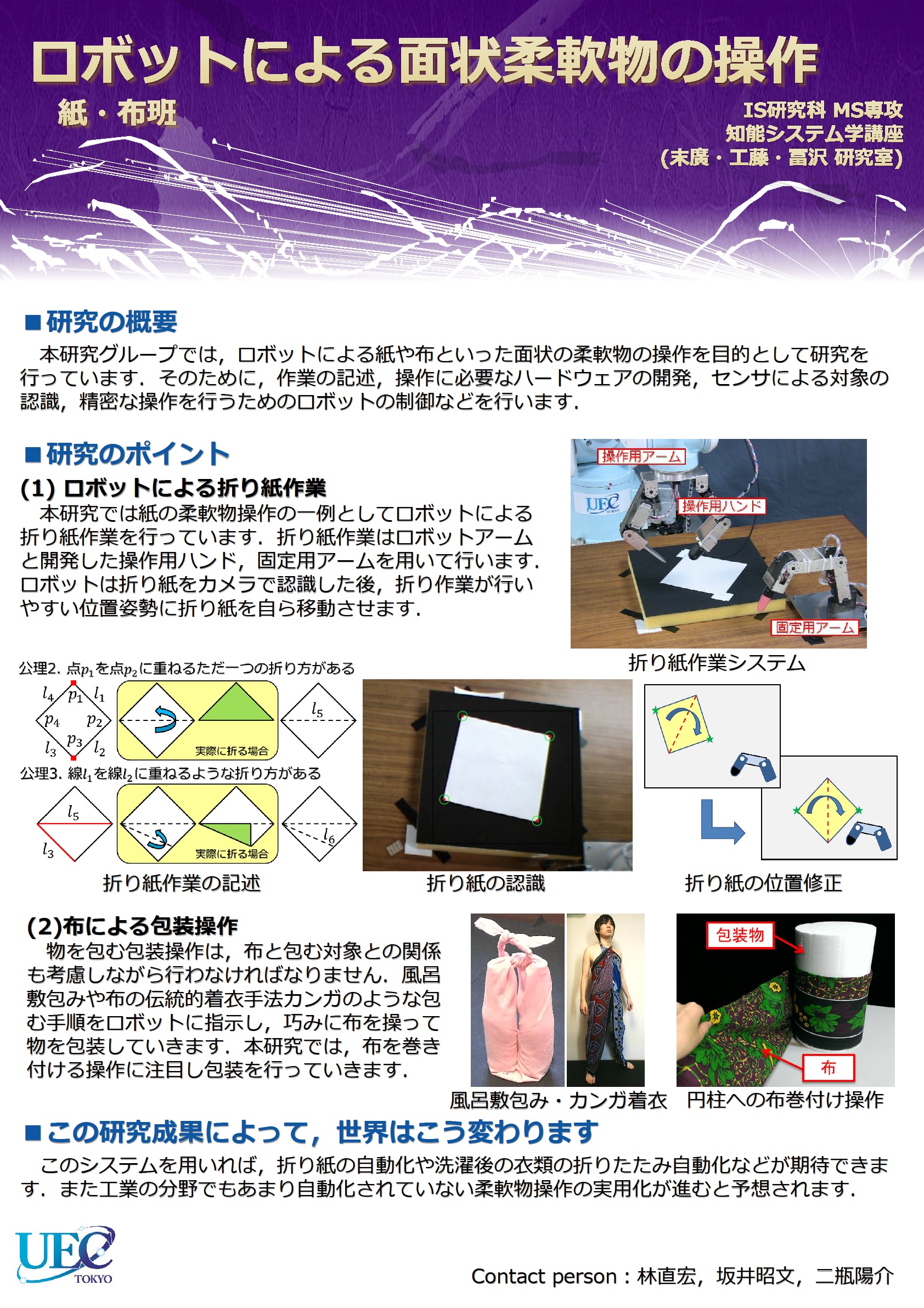
When we think of robots performing tasks, manipulators, or manipulation systems with a so-called robot arm at the core, are indispensable and important elements. Conventional industrial robots have been used to handle objects with fixed shapes in a well-developed factory environment. In this laboratory, we are conducting research to develop an intelligent system that can handle flexible objects with changing shapes in undeveloped environments such as offices and homes.
Research Poster (Japanese)