Transformable Climbing Robot
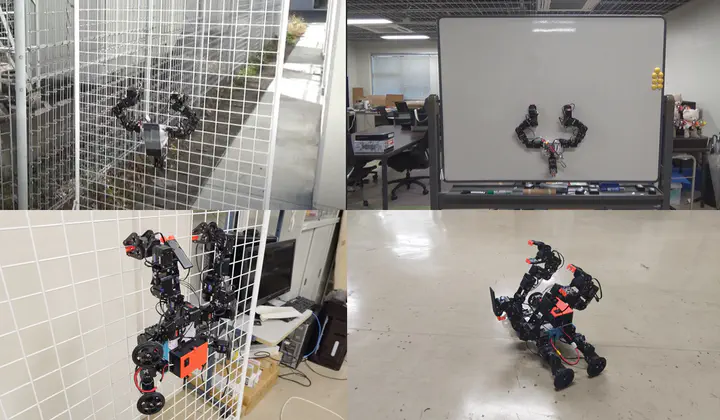
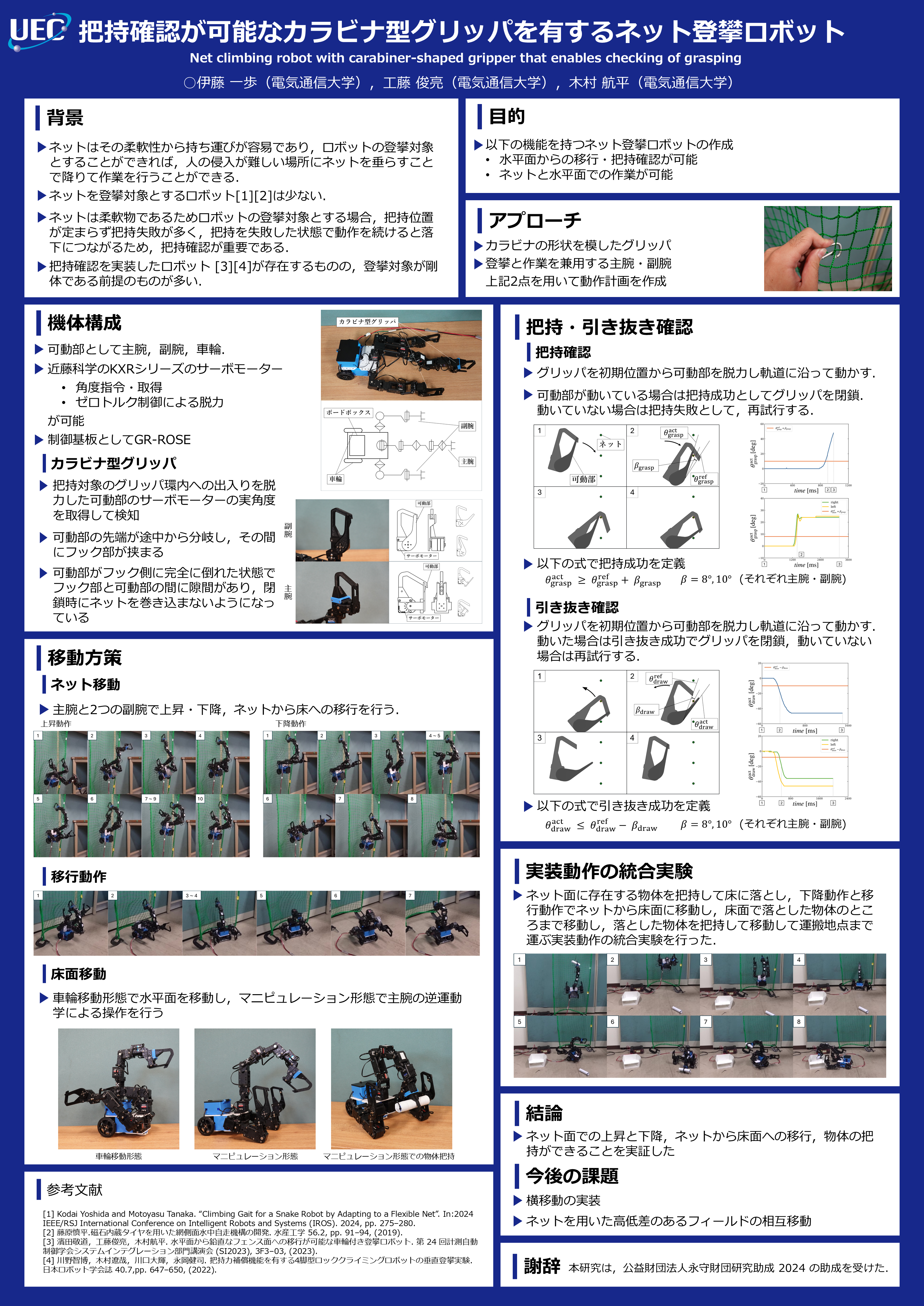
Robots that move along walls and ladders are today expected to be used at disaster and other sites as well as in everyday life. For example, robots can move along walls that are difficult for humans to penetrate to provide supplies, or they can be installed on fences to perform periodic inspections of facilities. This study have been working on a robot that can climb fences by grasping grippers and walls by suction cups by switching grippers and suction cups.
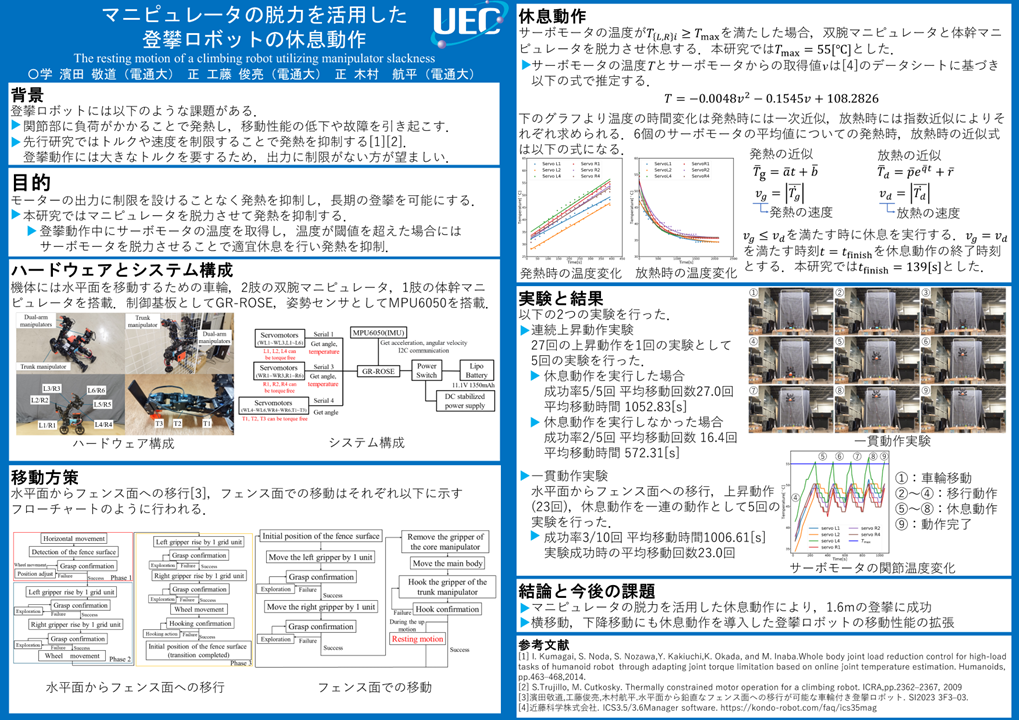
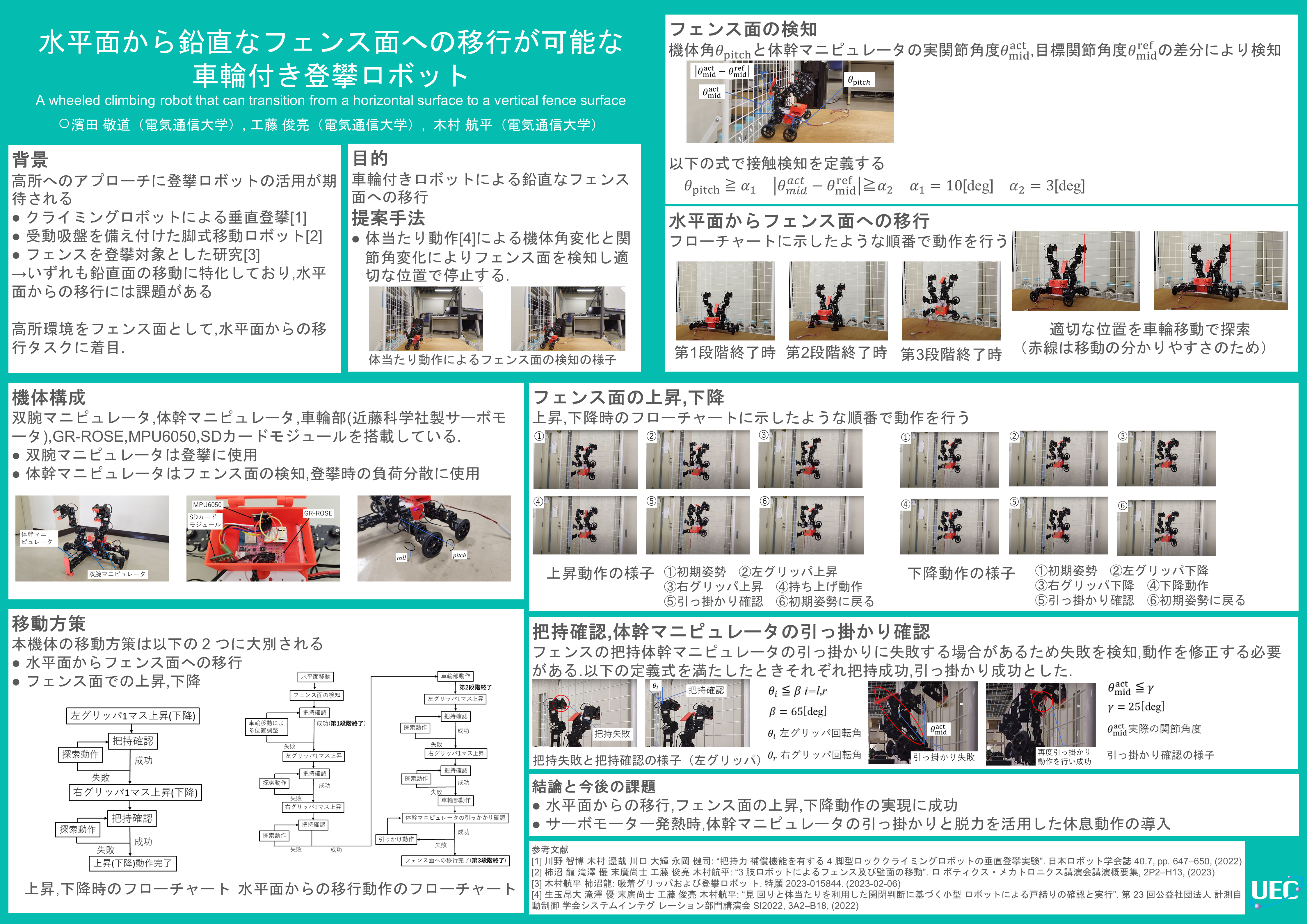
The above three-limbed robot can only move on vertical surfaces. The robot also has a problem that its joints generate heat, resulting in malfunctions and breakage of the joints. Therefore, this study have been additionally working on a wheeled climbing robot that can change its movement mode from horizontal to vertical, climb a vertical fence, and rest when the temperature rises. Using the same vehicle not only reduces costs, but also makes it possible to work in sites where fences and walls are mixed. Also, using three-limbed robots improves versatility over two-limbed robots, reduces the impact from ground surfaces over four- or six-limbed robots, and simplifies the planning of moves.
These studies realize the climbing robot to move in multiple environments on the same machine and improve its mobility performance, including the ability to rest and continue its climbing task even when its joints heat up due to the load.
Videos
Moving on a fence
Moving on a wall
Outdoor experiments
Outdoor experiments from another angle
Transition from horizontal plane to a fence + climbing while resting
Research poster (in Japanese)
Related works (in Japanese)
-
Ayumu Ito, Shunsuke Kudoh and Kohei Kimura. Net climbing robot with carabiner-shaped gripper that enables checking of grasping. 25th SICE System Integration Division Annual Conference (SI2024). 2B4-05. 2024.
-
木村 航平. 形態変化する登攀ロボット. 日本ロボット学会誌, Vol. 42 No. 7 pp. 636-641, 2024.
-
Takamiti Hamada, Shunsuke Kudoh and Kohei Kimura. The Resting Motion of a Climbing Robot Utilizing Manipulator Slackness. 2024 JSME Conference on Robotics and Mechatronics (ROBOMECH2024). 2P1-M09. 2024.
-
Takamichi Hamada, Shunsuke Kudoh and Kohei Kimura. A wheeled climbing robot that can transition from a horizontal surface to a vertical fence surface. 24th SICE System Integration Division Annual Conference (SI2023). 3F3-03. 2023.
-
柿沼 龍, 滝澤 優, 末廣 尚士, 工藤 俊亮, 木村 航平. 3肢ロボットによるフェンス及び壁面の移動. 日本機械学会ロボティクス・メカトロニクス講演会2023 (ROBOMECH2023), 2P2-H13. 2023.
-
木村 航平,柿沼 龍.吸着グリッパおよび登攀ロボット.特願2023-015844.2023/02/06.