Transformable Climbing Robot
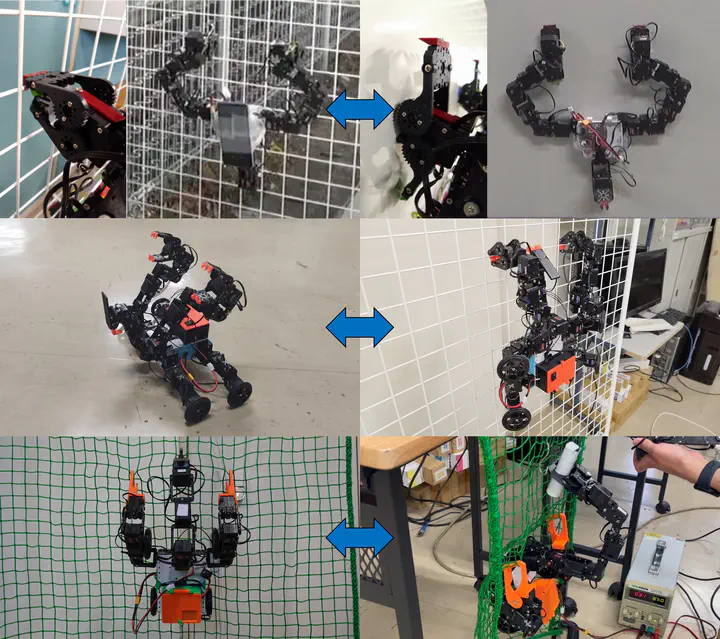
We have been developing a transformable climbing robot to expand its range of activities.
Climbing fence and wall
This study have been working on a robot that can climb both fences and walls by utilizing end-effectors that switch between grippers and suction cups. This study aims to realize a robot that can climbing vertical planes with various conditions.
Transition from horizontal plane to fence
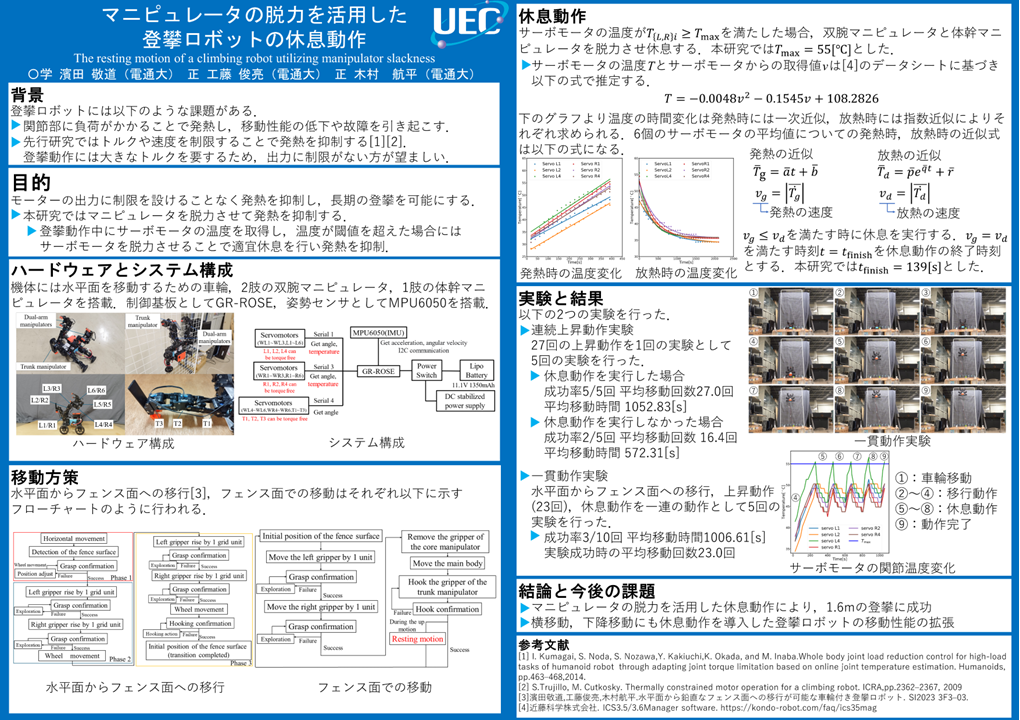
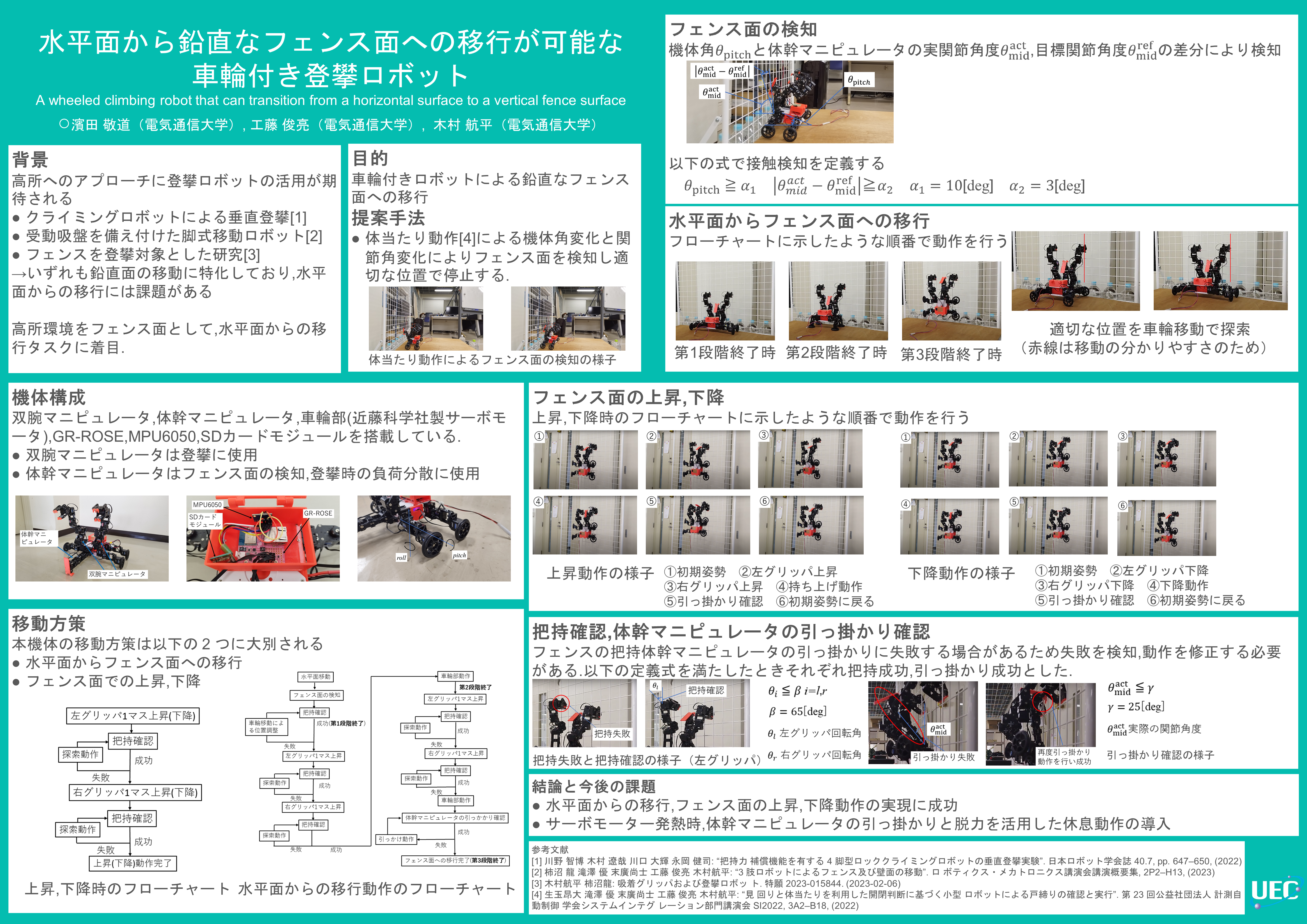
This study have been working on a wheeled climbing robot that can tranfer from a horizontal plane to a fence by transformation. This aims to extend the range of a single robot activity. Climbing robots have a problem that their joints generate a lot of heat during climbing, resulting in malfunctions and breakage. To solve this problem, we have been working on that the robot takes a rest when it detects a rise in temperature.
Climbing net
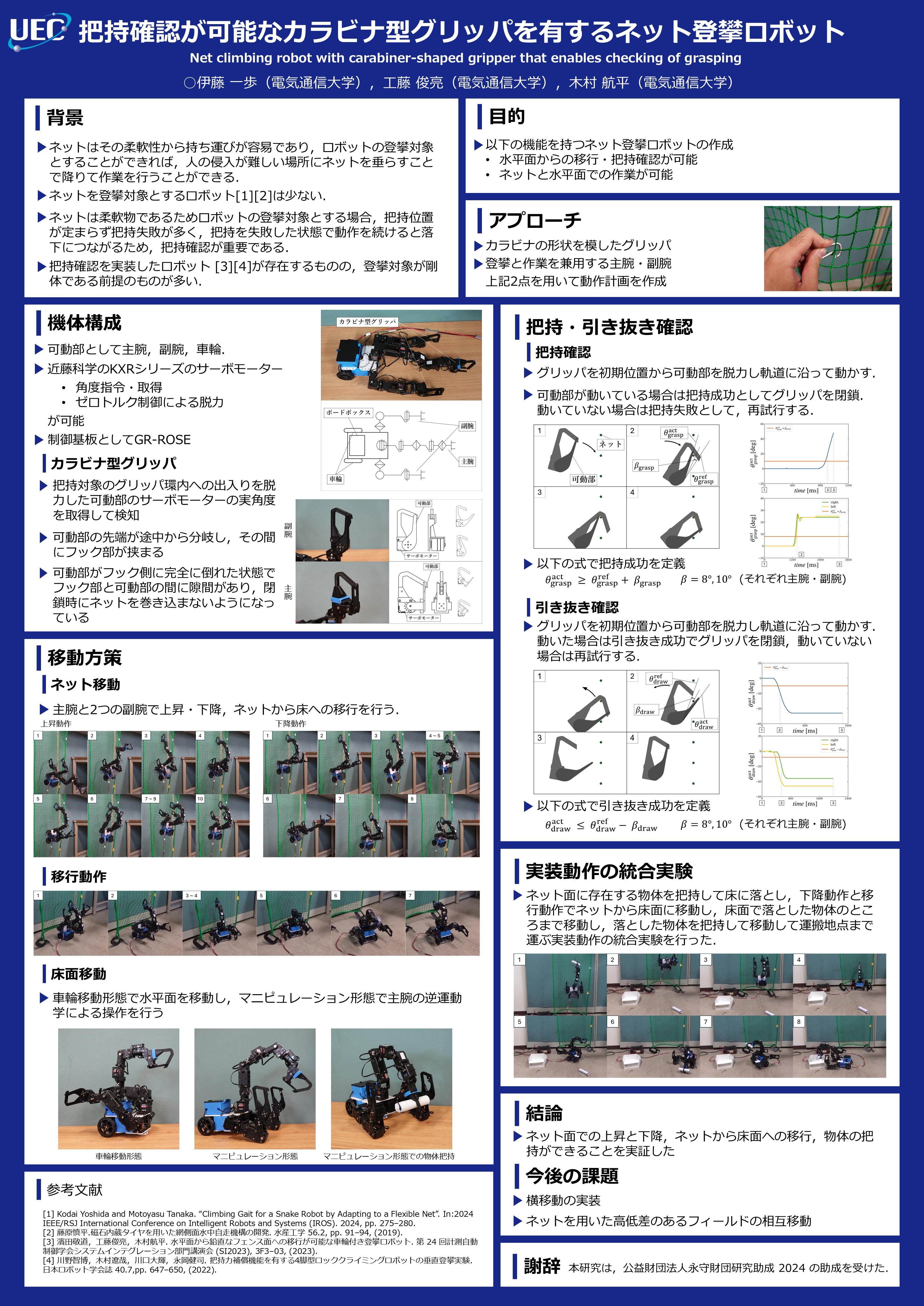
This study have been working on a robot that climbs a net installed vertically. It is difficult for the robot to grasp and climb the net, because it is flexible and unstable. To solve this problem, we have been developing carabiner-shaped gripper to grasp the net securely. This study aims the robot transfers between horizontal plane and vertical nets by utilizing this gripper.
- Climbing up from floor to net + grasping object on net
- Climbing down from the net to the floor + grasping an object on the horizontal plane
Videos
Climbing fence and wall
Climbing a fence
Climbing a wall
Outdoor experiments
Outdoor experiments from another angle
Transition from horizontal plane to a fence + climbing while resting
Climbing net
Climbing up from floor to net + grasping object on net
Climbing down from the net to the floor + grasping an object on the horizontal plane
Research poster (in Japanese)
Related works (in Japanese)
-
Ayumu Ito, Shunsuke Kudoh and Kohei Kimura. Net climbing robot with carabiner-shaped gripper that enables checking of grasping. 25th SICE System Integration Division Annual Conference (SI2024). 2B4-05. 2024.
-
木村 航平. 形態変化する登攀ロボット. 日本ロボット学会誌, Vol. 42 No. 7 pp. 636-641, 2024.
-
Takamiti Hamada, Shunsuke Kudoh and Kohei Kimura. The Resting Motion of a Climbing Robot Utilizing Manipulator Slackness. 2024 JSME Conference on Robotics and Mechatronics (ROBOMECH2024). 2P1-M09. 2024.
-
Takamichi Hamada, Shunsuke Kudoh and Kohei Kimura. A wheeled climbing robot that can transition from a horizontal surface to a vertical fence surface. 24th SICE System Integration Division Annual Conference (SI2023). 3F3-03. 2023.
-
柿沼 龍, 滝澤 優, 末廣 尚士, 工藤 俊亮, 木村 航平. 3肢ロボットによるフェンス及び壁面の移動. 日本機械学会ロボティクス・メカトロニクス講演会2023 (ROBOMECH2023), 2P2-H13. 2023.
-
木村 航平,柿沼 龍.吸着グリッパおよび登攀ロボット.特願2023-015844.2023/02/06.