Transformable Climbing Robot
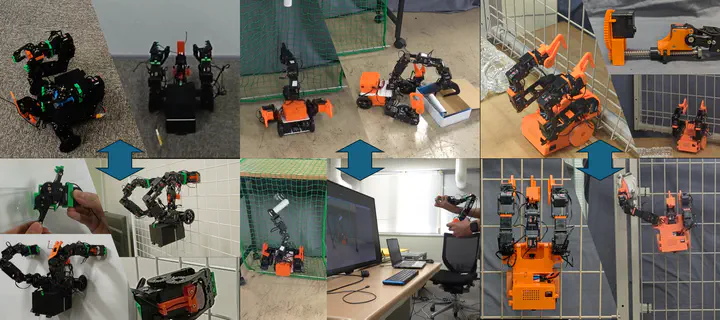
We have been developing a transformable climbing robot to expand its range of activities.
A robot climbing fences and walls
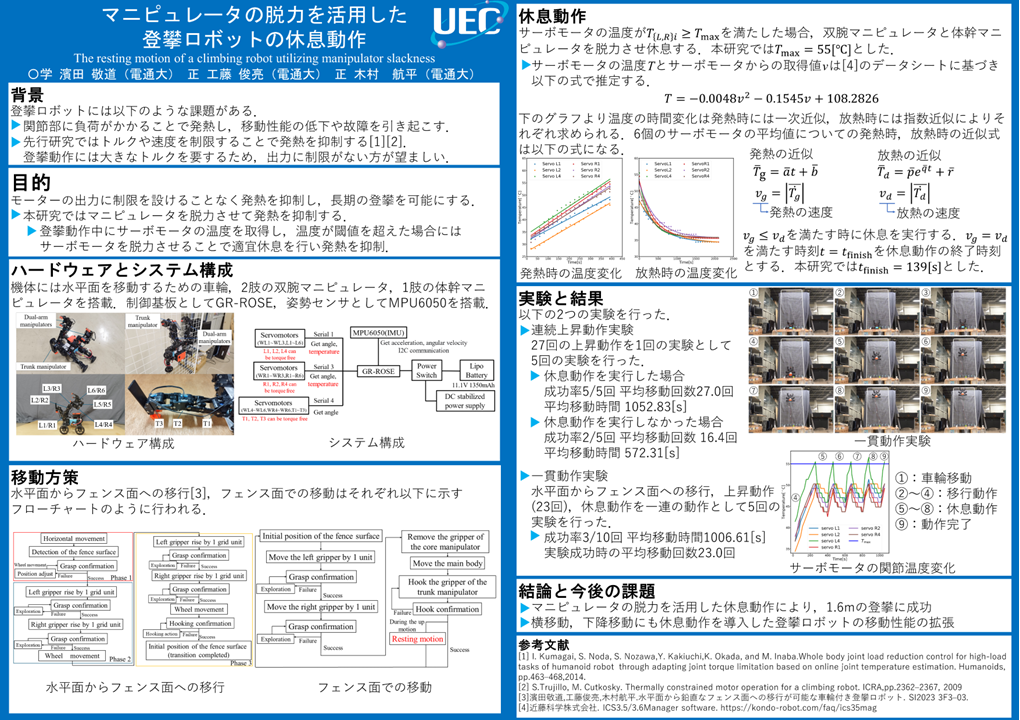
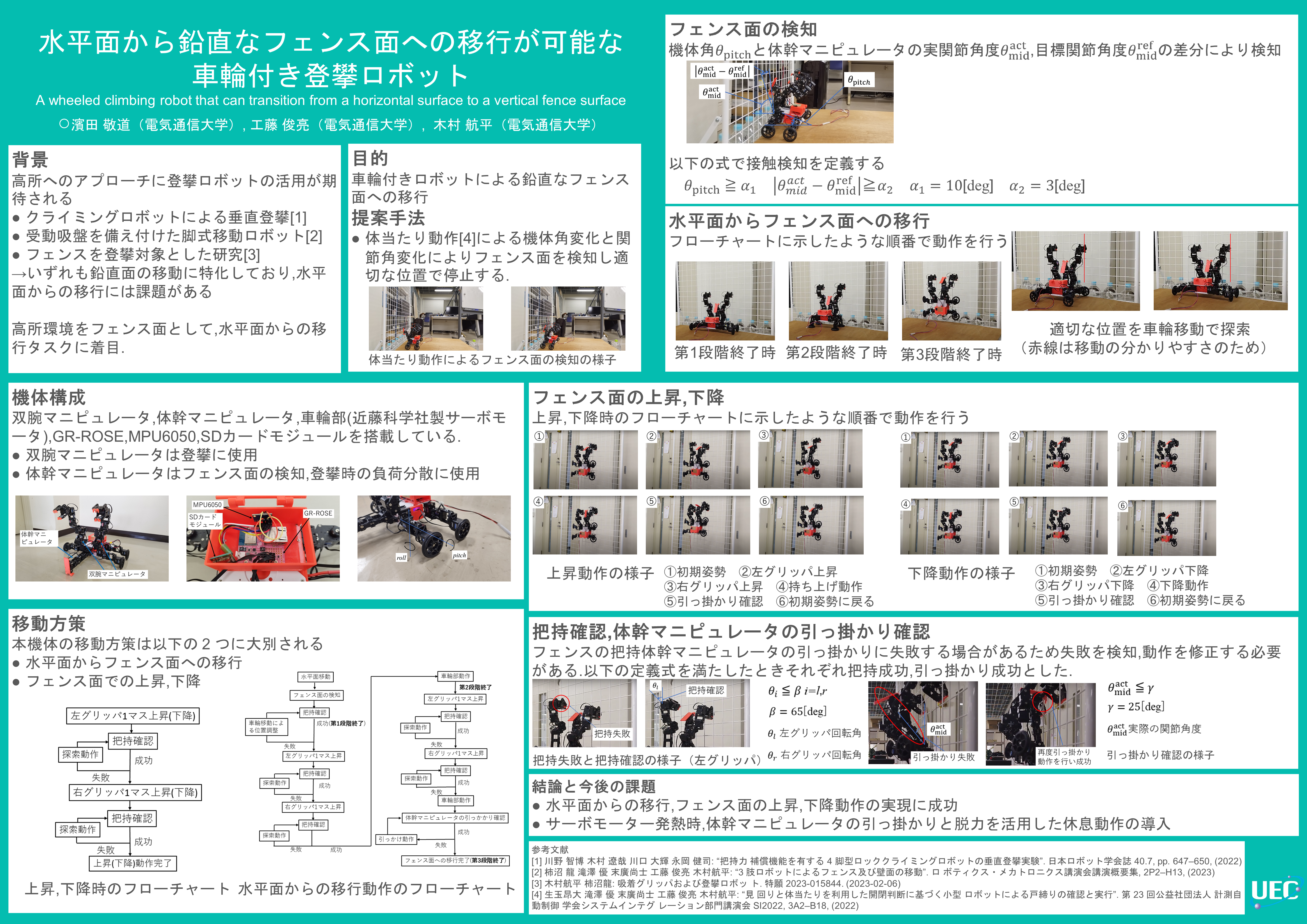
This study has been working on a robot that can climb both fences and walls and transition from a horizontal plane to a vertical surface, utilizing a transformable end effector combining gripping by a gripper and suction by a suction cup (gripper with suction cup). Currently, the robot faces issues such as falling due to failed suction or slipping suction cups when climbing walls. Resolving these challenges is a key priority.
- Climbing a fence
- Climbing a wall
- Outdoor experiments
- Outdoor experiments from another angle
- Transition from horizontal plane to a fence + climbing while resting
- Fence integration experiment
- Wall integration experiment
Climbing net
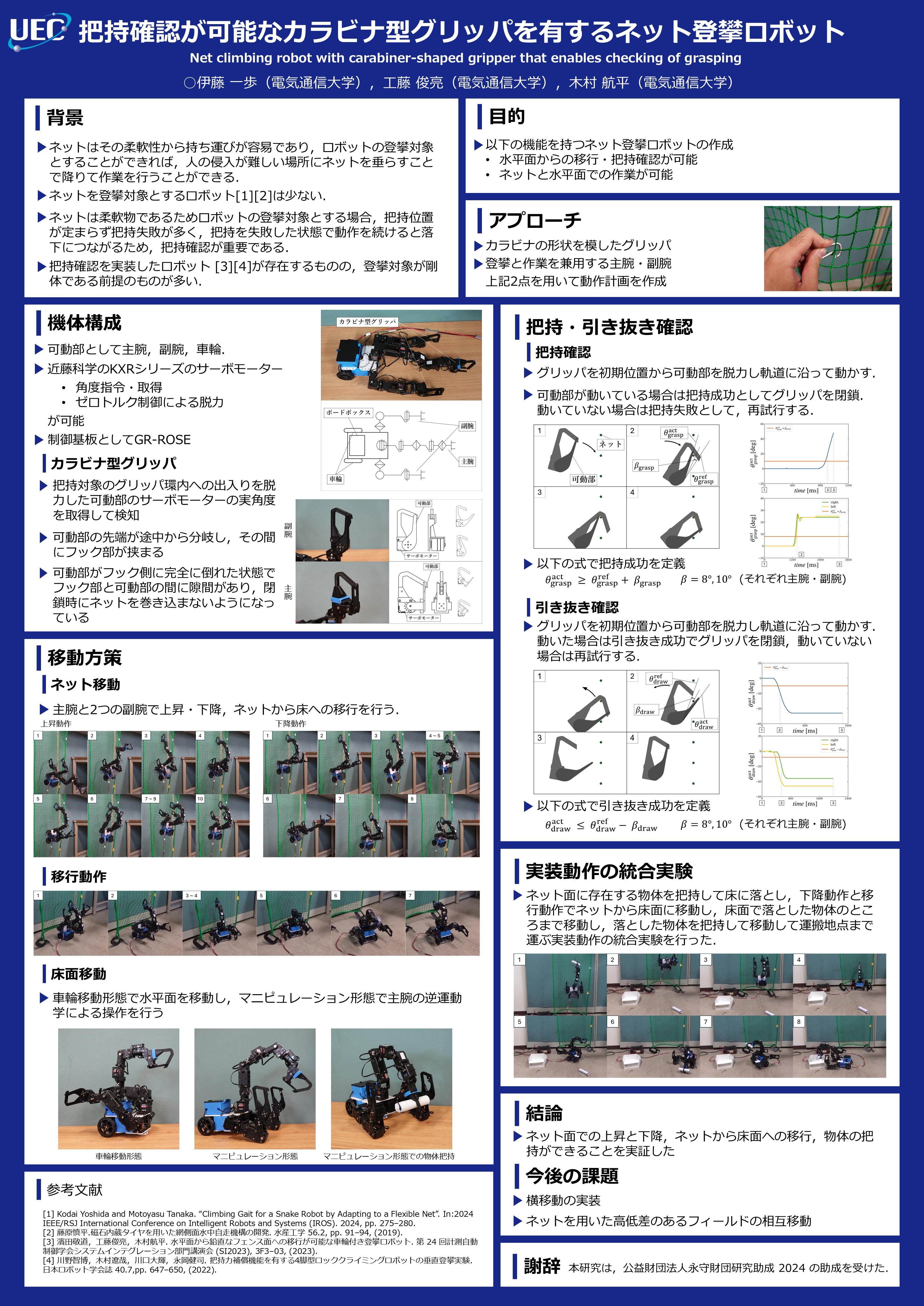
This study have been working on a robot that climbs a net installed vertically. It is difficult for the robot to grasp and climb the net, because it is flexible and unstable. To solve this problem, we have been developing carabiner-shaped gripper to grasp the net securely. This study aims the robot transfers between horizontal plane and vertical nets by utilizing this gripper.
- Climbing up from floor to net + grasping object on net
- Climbing down from the net to the floor + grasping an object on the horizontal plane
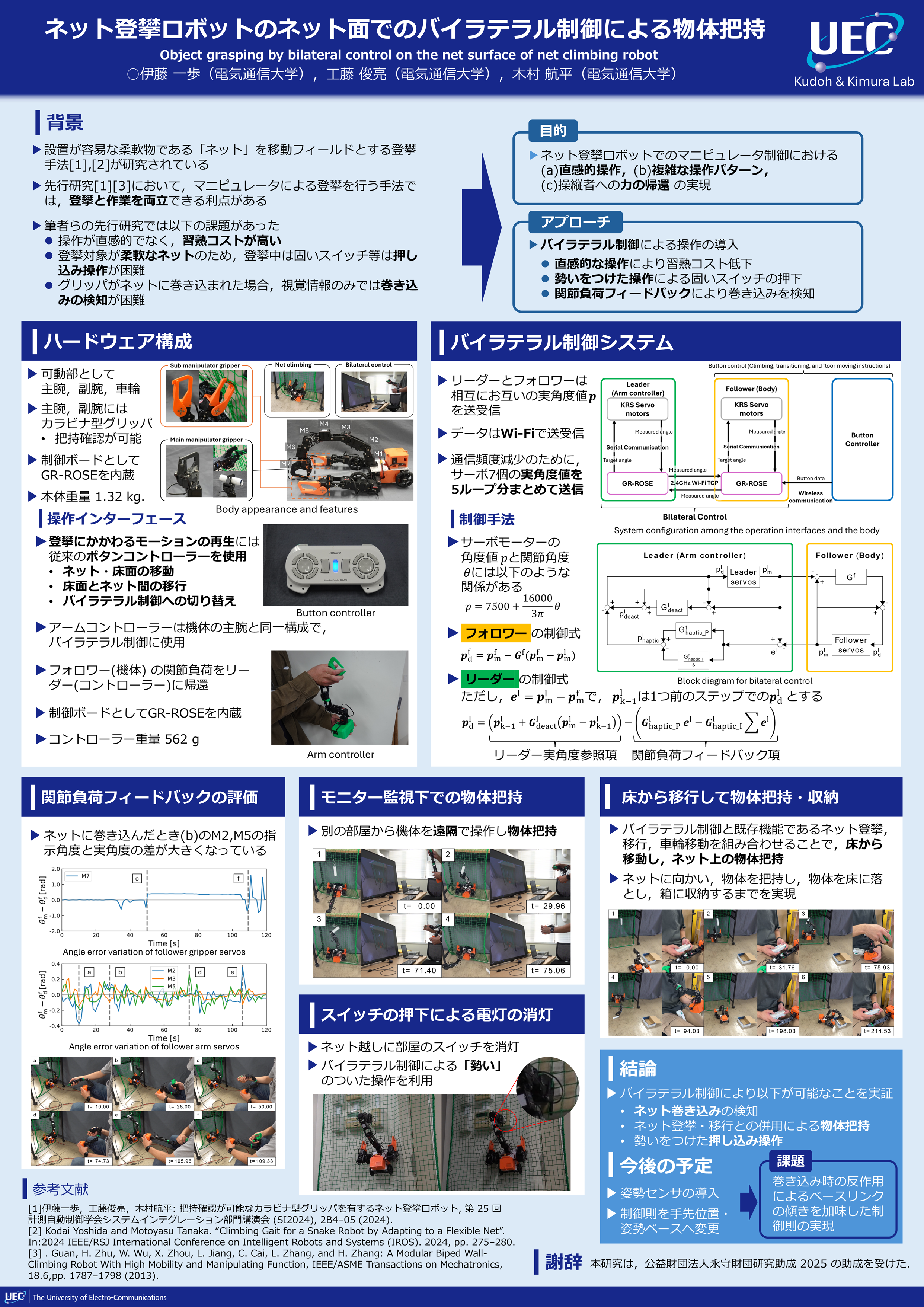
- Object grasping by bilateral control on the net surface of net climbing robot
Opening fence gate
We are researching a climbing robot designed to open fence gates. There are several challenges with conventional robots: due to the limited range of motion of their arms, they can only climb fences with fine meshes, and they have low operability on fences with few footholds. To solve this, we developed a “feed screw mechanism,” which makes it possible to climb and perform tasks on fences with vertically large meshes. In this research, by combining this mechanism with the ability to transition smoothly between the horizontal ground and the vertical fence, we are tackling the task of opening a fence gate.
Videos
Climbing fence and wall
Climbing a fence
Climbing a wall
Outdoor experiments
Outdoor experiments from another angle
Transition from horizontal plane to a fence
Transition from horizontal plane to a fence + climbing while resting
Fence integration experiment(Video at 32x speed)
Wall integration experiment(Video at 48x speed)
Climbing net
Climbing up from floor to net + grasping object on net
Climbing down from the net to the floor + grasping an object on the horizontal plane
Object grasping by bilateral control on the net surface of net climbing robot
Opening fence gate
Research poster (in Japanese)
Related works (in Japanese)
-
Tokihiro Yamaguchi, Shunsuke Kudoh and Kohei Kimura. Fence gate opening by a climbing robot equipped with a feed screw mechanism. 2026 JSME Conference on Robotics and Mechatronics (ROBOMECH2026). 1A2-I08. 2026.
-
Ayumu Ito, Shunsuke Kudoh and Kohei Kimura. Net Climbing by Manipulators Equipped with a Carabiner-shaped Gripper to Grasp Confirmation. Vol.62 No.5 pp.192-205.
-
Ayumu Ito, Shunsuke Kudoh and Kohei Kimura. Object grasping by bilateral control on the net surface of net climbing robot. 26th SICE System Integration Division Annual Conference (SI2025). 3C5-01. 2025.
-
T. Hamada, S. Kudoh and K. Kimura, “Transformable Robot with Suction Cup Assisted Grippers for Climbing Fences and Walls,” 2025 IEEE International Conference on Robotics and Biomimetics (ROBIO), Chengdu, China, 2025, pp. 2217-2224, doi: 10.1109/ROBIO66223.2025.11376132.
-
Ayumu Ito, Shunsuke Kudoh and Kohei Kimura. Net climbing robot with carabiner-shaped gripper that enables checking of grasping. 25th SICE System Integration Division Annual Conference (SI2024). 2B4-05. 2024.
-
木村 航平. 形態変化する登攀ロボット. 日本ロボット学会誌, Vol. 42 No. 7 pp. 636-641, 2024.
-
Takamiti Hamada, Shunsuke Kudoh and Kohei Kimura. The Resting Motion of a Climbing Robot Utilizing Manipulator Slackness. 2024 JSME Conference on Robotics and Mechatronics (ROBOMECH2024). 2P1-M09. 2024.
-
Takamichi Hamada, Shunsuke Kudoh and Kohei Kimura. A wheeled climbing robot that can transition from a horizontal surface to a vertical fence surface. 24th SICE System Integration Division Annual Conference (SI2023). 3F3-03. 2023.
-
柿沼 龍, 滝澤 優, 末廣 尚士, 工藤 俊亮, 木村 航平. 3肢ロボットによるフェンス及び壁面の移動. 日本機械学会ロボティクス・メカトロニクス講演会2023 (ROBOMECH2023), 2P2-H13. 2023.
-
木村 航平,柿沼 龍.吸着グリッパおよび登攀ロボット.特願2023-015844.2023/02/06.