マニピュレーションシステム
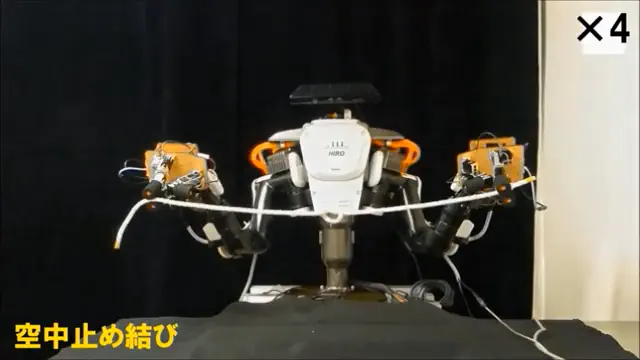 マニピュレータによる紐結び動作の実現
マニピュレータによる紐結び動作の実現
ロボットが作業をするということを考えた場合、マニピュレータ、いわゆるロボットアームを核としたマニピュレーションシステムは欠かすことのできない重要な要素です。従来の産業用ロボットは工場内の整備された環境で形状が決まったものをハンドリングしてきました。本研究室では、オフィスや家庭などの未整備な環境で形状が変化する柔軟物を扱えるような知能システムを目指して研究を行っています。
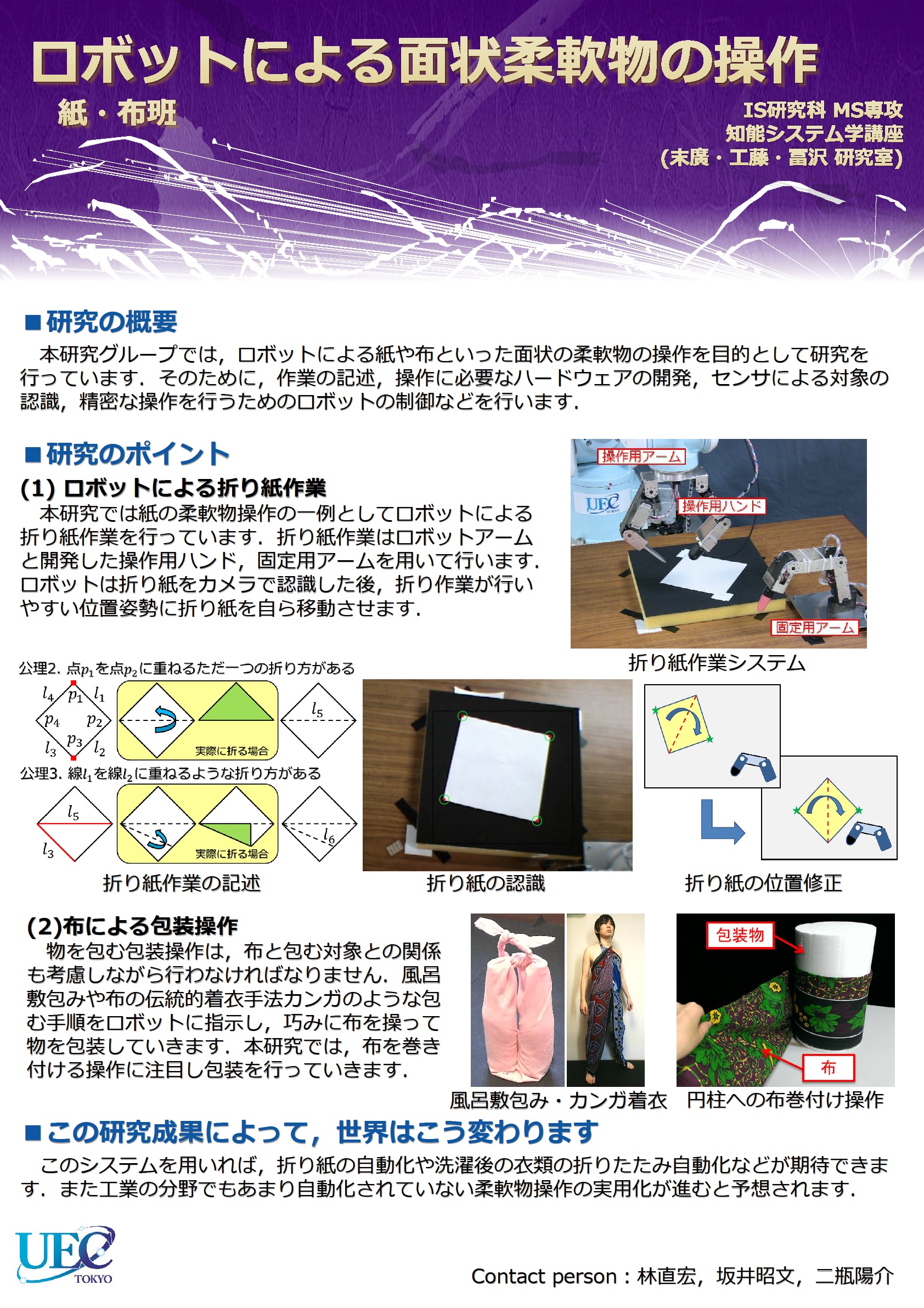
研究ポスター

簡単マニピュレーション
- OpenRAVEとOpenRTMの連携させるためのコントローラに関する研究
- ロボットアームによるLRFとカメラを用いた物体操作の研究
- ビューベーストマニピュレーション