袋付きマニピュレータを備えた片付けロボット
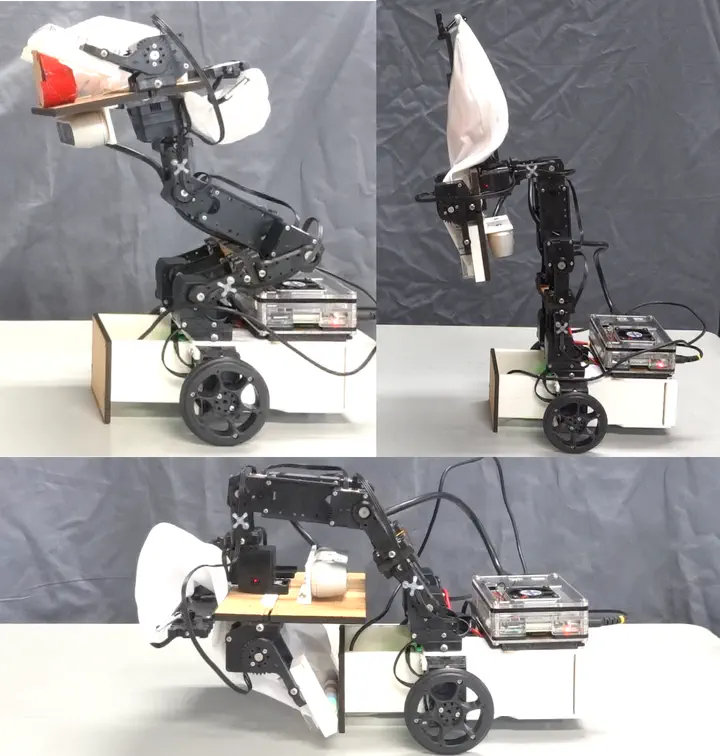
本研究では,袋を取り付けたマニピュレータを開発し,それを備えた移動ロボットによる片付けに取り組んでいます.
袋を取り付けたマニピュレータのハードウェア,ソフトウェアの開発,改良を行っています.これより以下のタスクを単一のマニピュレータで実現することを目指しています.
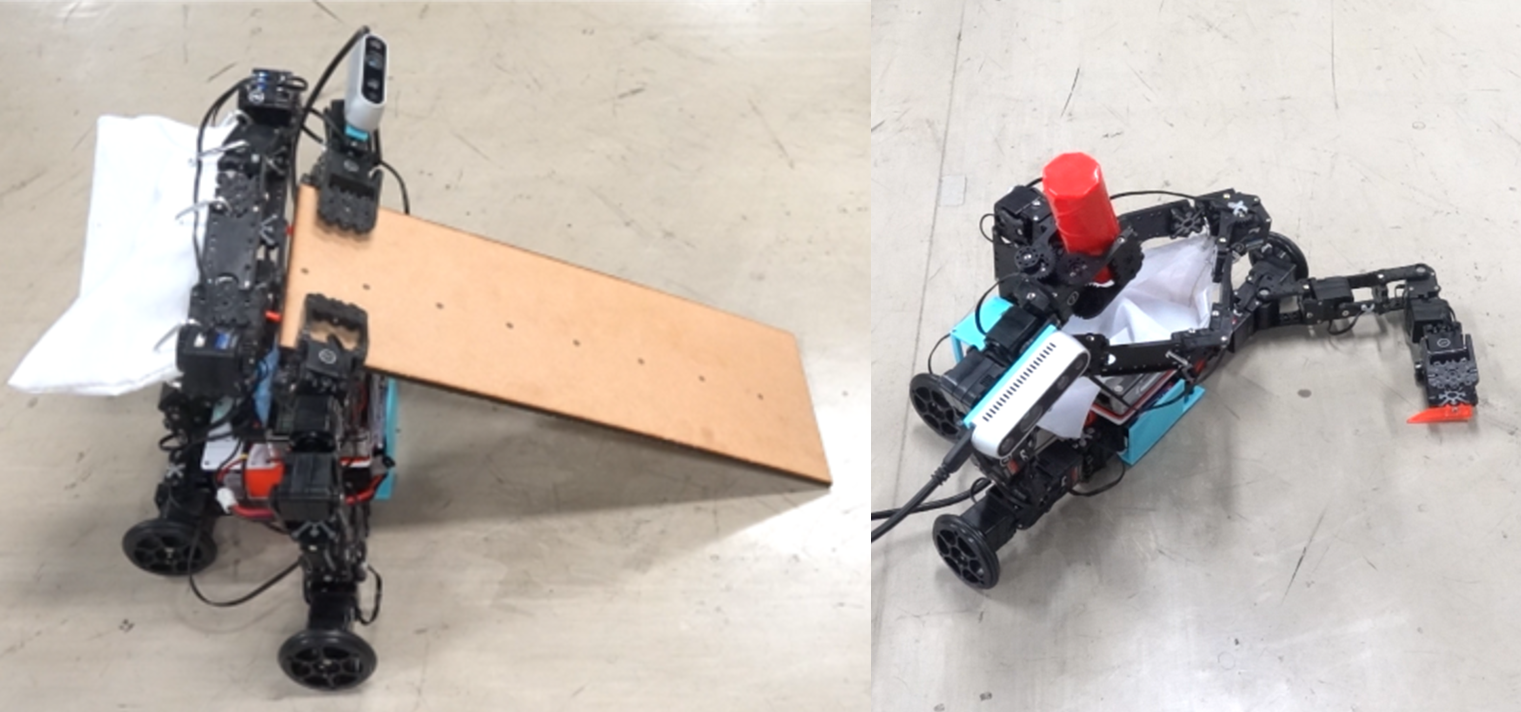
- 様々な大きさ,形状の物体を回収する.
- 複数物体を同時に回収する.
- 回収物を仕分けて片付ける.
動画
片付けタスクの所要時間短縮 / 把持失敗時のリカバリー動作(2025年12月以降)
ねじ6個を拾う場合での時間比較
微小物の寄せ集め
把持失敗に対するリカバリー(微小物)
把持失敗に対するリカバリー(長尺物)
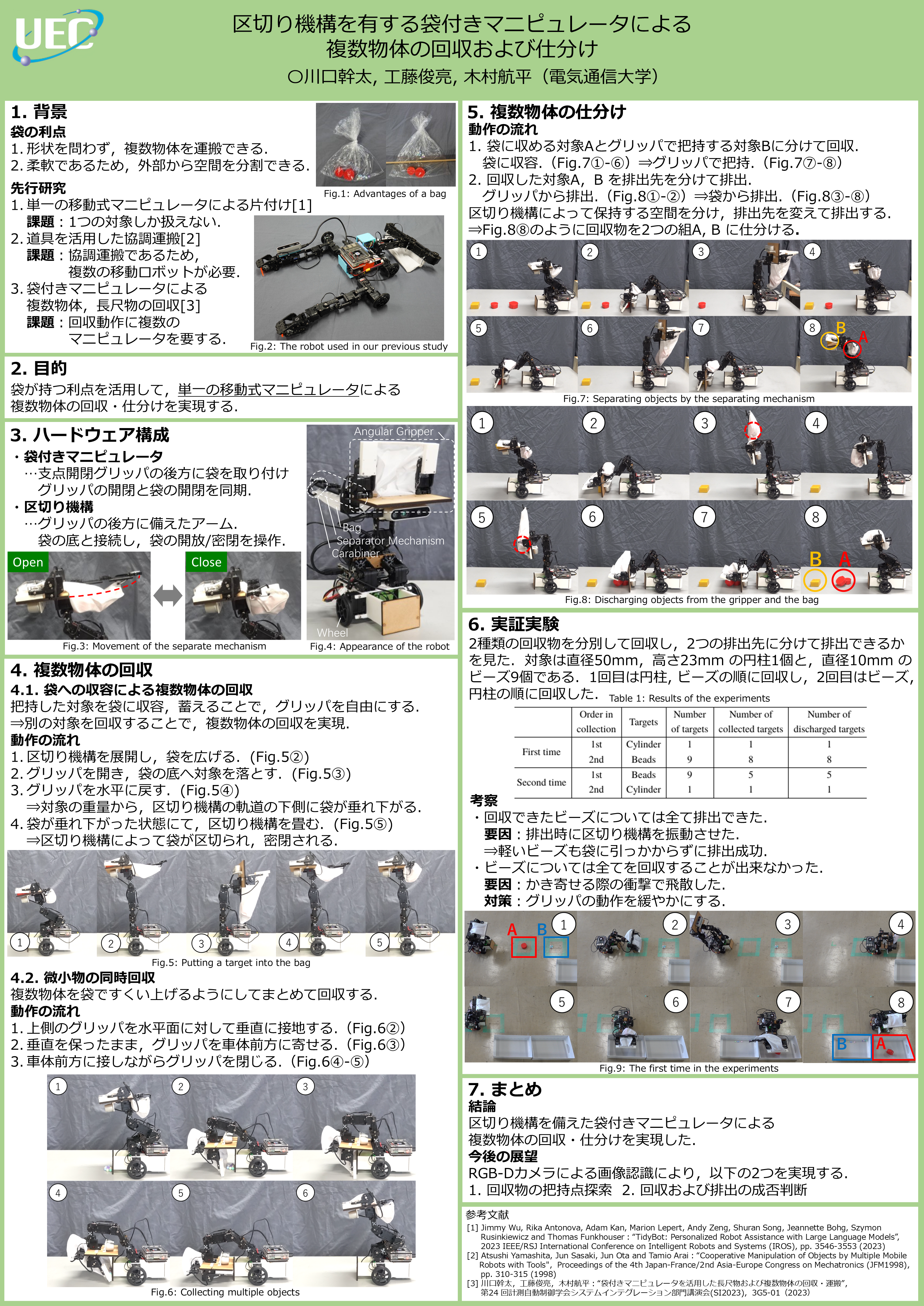
単一のマニピュレータによる複数物体の回収と仕分け(2025年12月以前)
微小物の同時回収
複数物体の仕分け
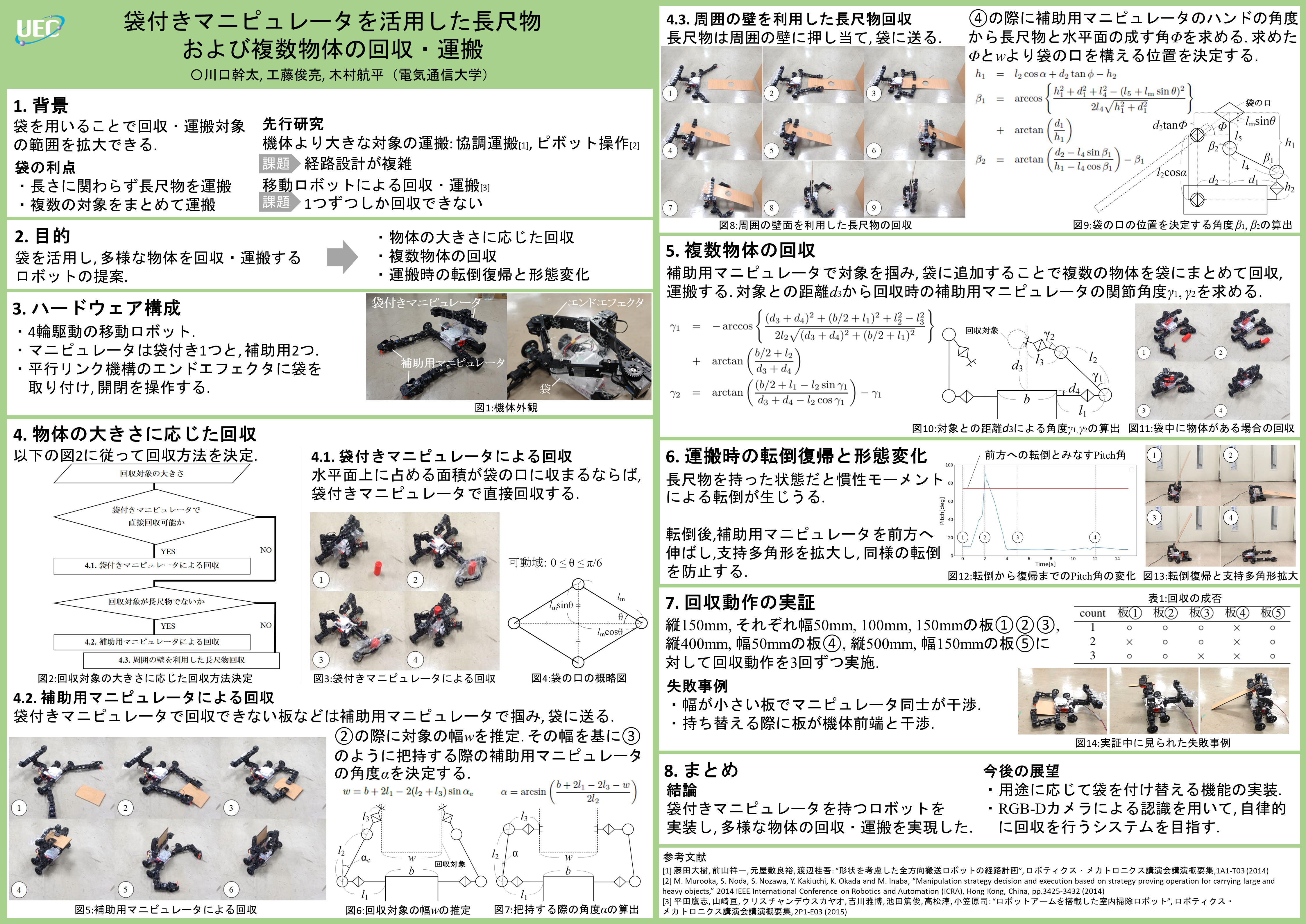
複数物体と長尺物の回収の両立(2024年3月以前)
袋付きマニピュレータのみでの回収
板材の回収
長尺物の回収
狭隘空間でのタスク継続
支持多角形の拡大による転倒の再発防止
複数物体の片付け
研究ポスター
関連文献
-
川口 幹太, 工藤 俊亮, 木村 航平. 袋付きマニピュレータを備えた小型移動ロボットによる複数物体および長尺物の片付け. 計測自動制御学会論文集.Vol.61 No.1 pp.18-31
-
川口 幹太, 工藤 俊亮, 木村 航平. 区切り機構を有する袋付きマニピュレータによる複数物体の回収および仕分け. 第25回計測自動制御学会システムインテグレーション部門講演会. SI2024. 1B7-02
-
川口 幹太, 工藤 俊亮, 木村 航平. 袋付きマニピュレータを活用した長尺物および複数物体の回収・運搬. 第24回SICEシステムインテグレーション部門講演会講演概要集. 2023. 3G5-01

