その他
マニピュレーションシステム
ロボットが作業をするということを考えた場合、マニピュレータ、いわゆるロボットアームを核としたマニピュレーションシステムは欠かすことのできない重要な要素です。従来の産業用ロボットは工場内の整備された環境で形状が決まったものをハンドリングしてきました。本研究室では、オフィスや家庭などの未整備な環境で形状が変化する柔軟物を扱えるような知能システムを目指して研究を行っています。
研究ポスター

簡単マニピュレーション
- OpenRAVEとOpenRTMの連携させるためのコントローラに関する研究
- ロボットアームによるLRFとカメラを用いた物体操作の研究
- ビューベーストマニピュレーション
柔軟物マニピュレーション
マニピュレータによる紐結び動作の実現
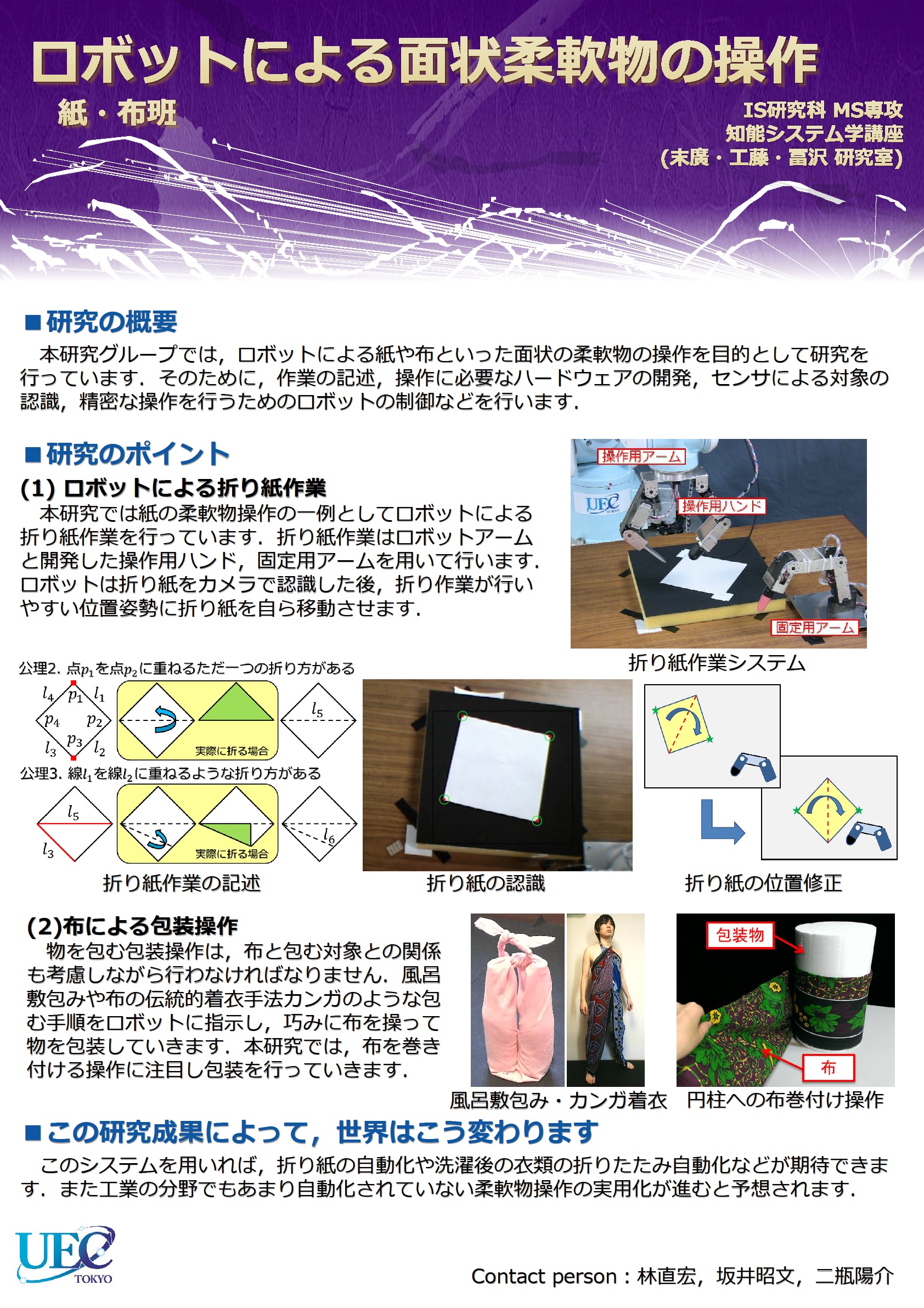
マニピュレータによる布被覆操作の実現
ロボットによる被覆操作のための教示方法
持ち替え・持ち直し操作を用いた布巻付け作業計画
統合化技術
知能システム、いわゆるロボットは様々な要素技術を統合しなくては構築できません。我々の研究室ではそのようなシステム統合を強く意識しながら研究を行っています。たとえばロボット用コンポーネント技術の世界標準に基づくRTミドルウェアであるOpenRTMや、移動ロボット研究で広く用いられているSSM (Sensor Sharing Manager)などを積極的に利用して構造が明確で再利用しやすいシステム構築を行っています。また単にそれらを利用するだけでなくミドルウェアや必要なツールの研究開発や、標準化への貢献も行います。
また知能ロボットが作業(移動を含め)を行うために必要な動作(技能、スキル)を体系立てて研究を行うことで、単に一つの動作をするロボットできたということではなく、ロボットや作業が異なっていても作業ができる再利用性の高い技術として提供することを目指しています。
RTミドルウェア
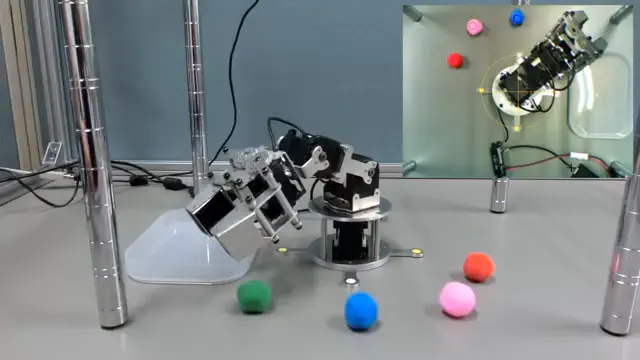
アームロボットによるカラーボールのお片づけ
屋内サービスロボット用RTC群
人間行動の観察
人間とロボットがかかわりを持つようになると,ロボットが人間の行動を観察・理解することが不可欠になってきます。人間がいちいちロボットが何をすべきかを指図するのではなく,人間の行動を観察することによって,人間が「何をしているのか」あるいは「何をしたいのか」をきちんと理解し,それに基づいて適切な行動をすることが求められるようになるからです。本研究室では、人間の行動を観察し、それを真似て作業を行ったり、人間の意図を理解して支援を行うような知能システムを目指して研究を行っています。
研究ポスター

自律移動ロボット
これは以前の研究です。現在は研究しておりません。
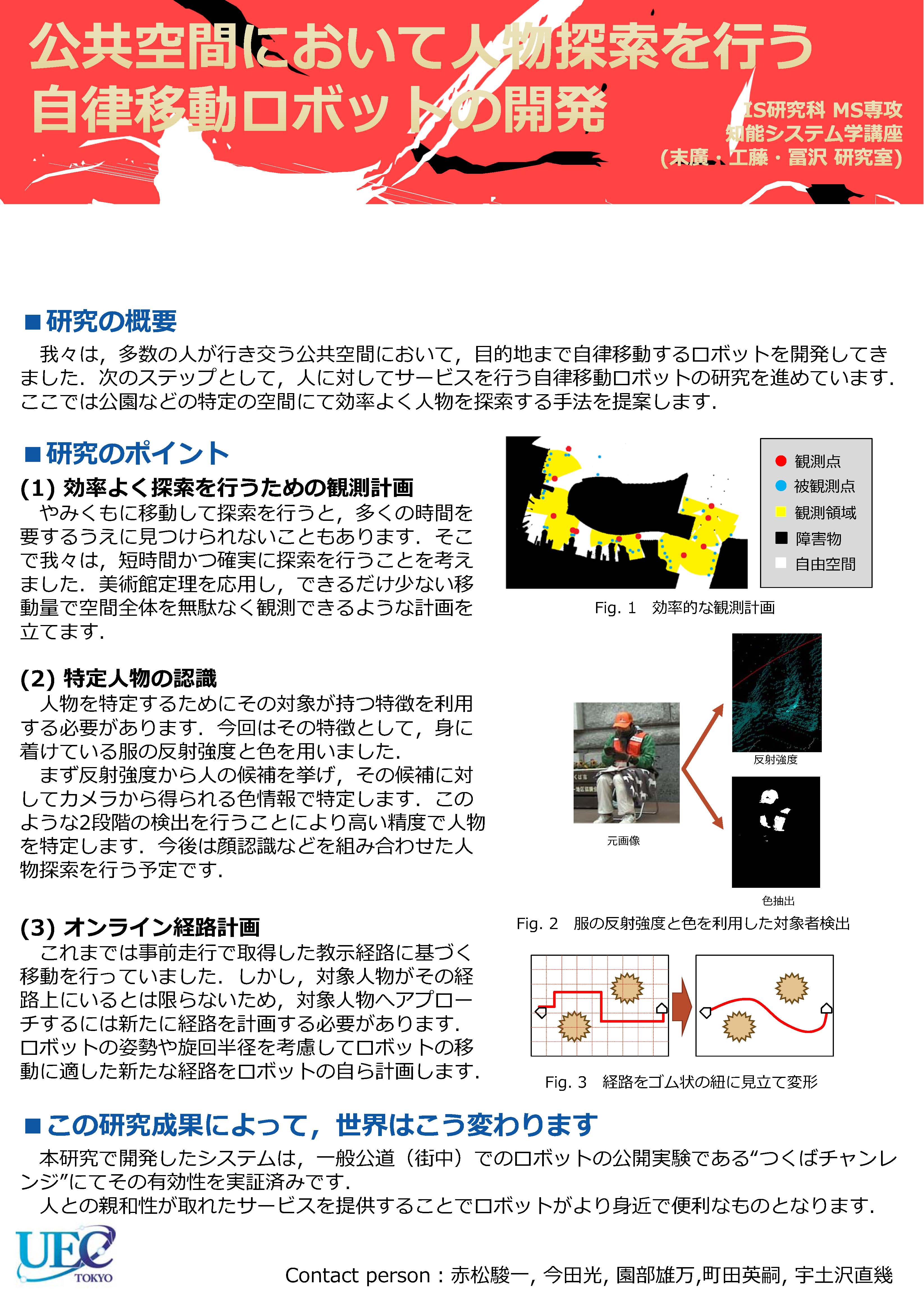
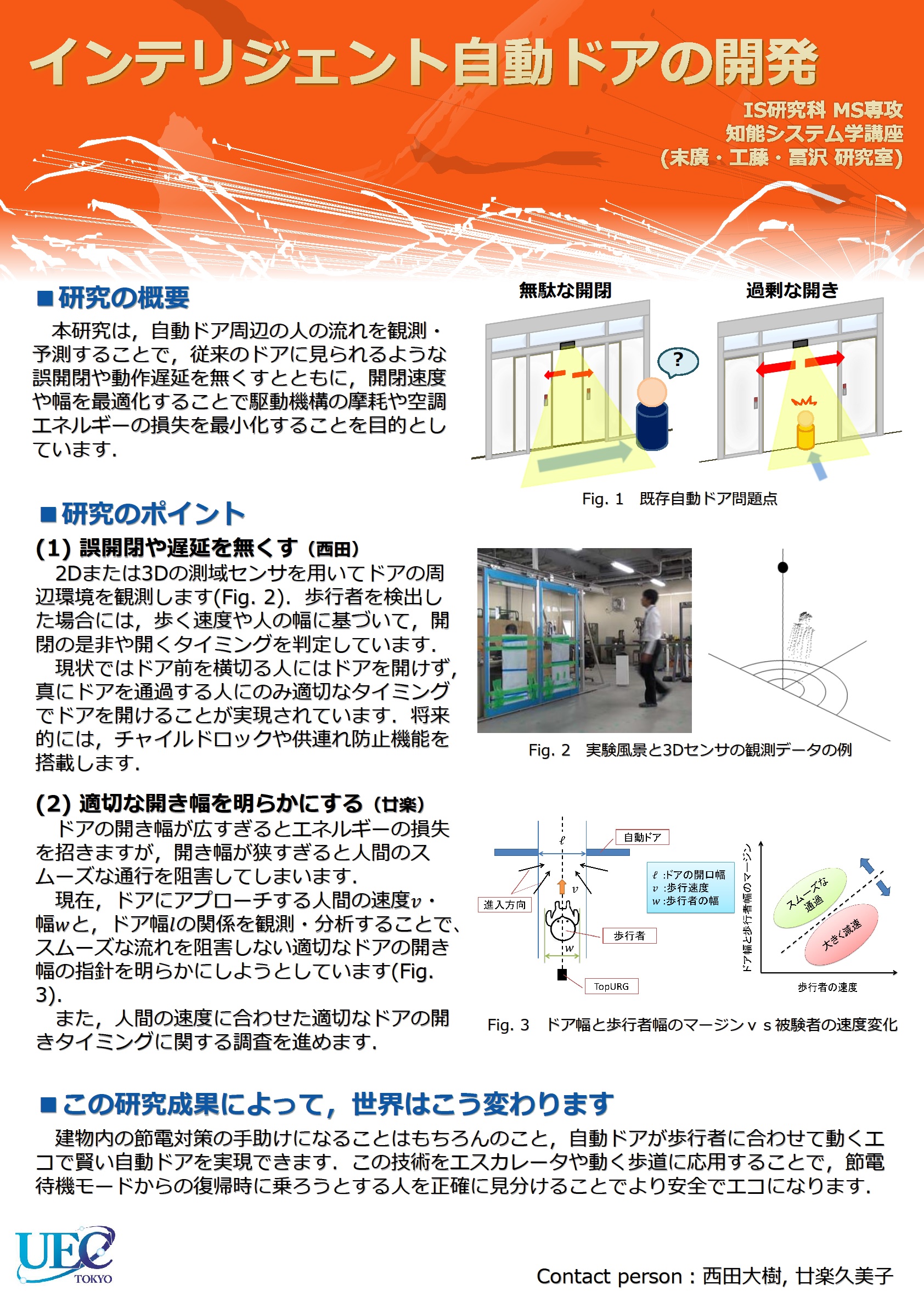
人間は、はじめて訪れた場所であっても、地図さえあれば、いま自分がどこにいて、どうすれば目的地まで到達できるかを判断することができます。物理的なサービスを提供するためのロボットには人間と同様の知能が求められます。本研究室では、多くの人間が共存する現実的な環境で、屋内外を問わずどこにいても自分自身や周囲の状況を正確に把握し、任意の場所まで移動でき知能システムを目指して研究を行っています。
研究ポスター