Others
Manipulation Systems
When we think of robots performing tasks, manipulators, or manipulation systems with a so-called robot arm at the core, are indispensable and important elements. Conventional industrial robots have been used to handle objects with fixed shapes in a well-developed factory environment. In this laboratory, we are conducting research to develop an intelligent system that can handle flexible objects with changing shapes in undeveloped environments such as offices and homes.
Research Poster (in Japanese)

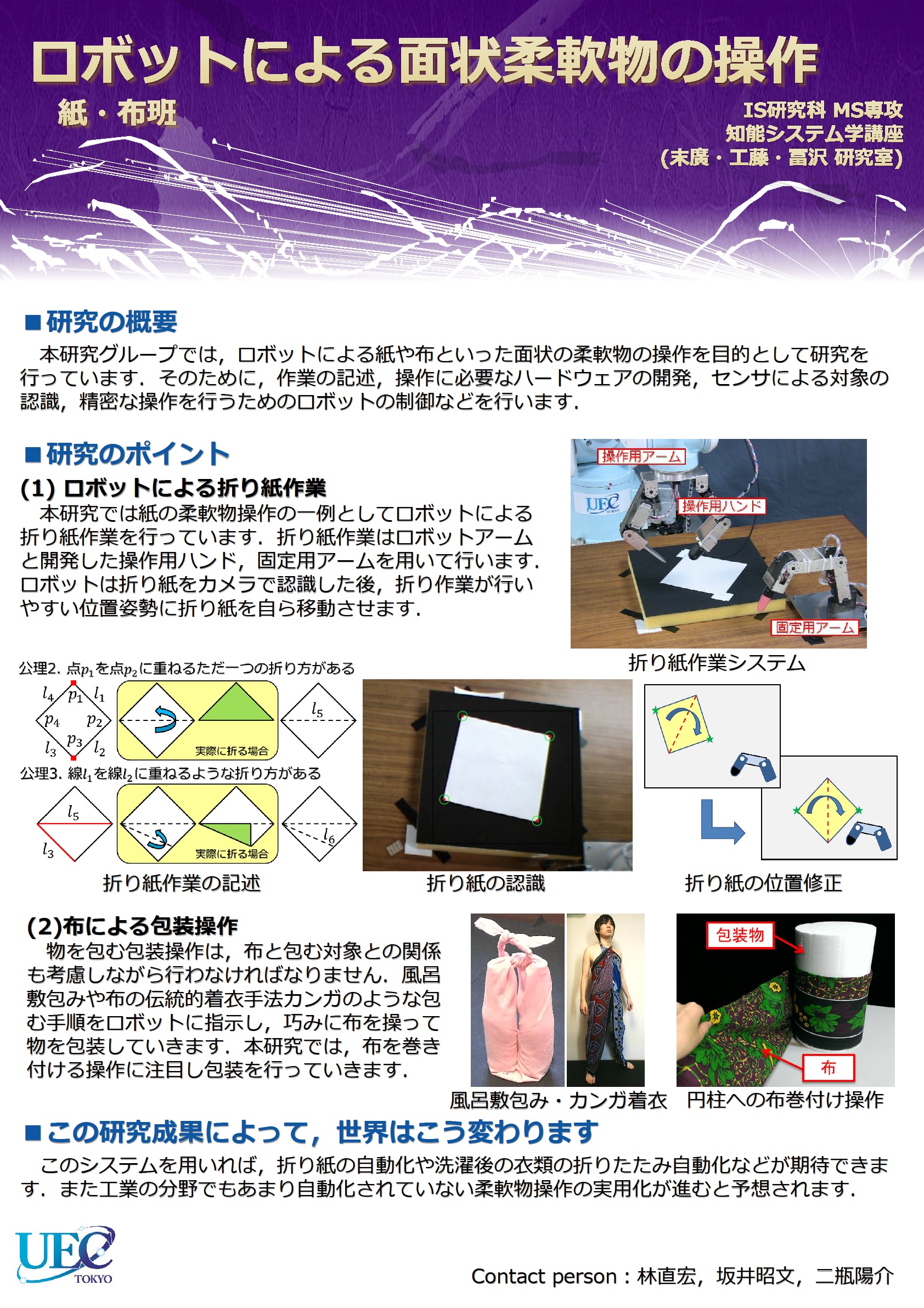
Flexible object manipulation
String Tying Motion by Manipulator
Cloth Covering Operation by Manipulator
Teaching method for coating operation by robot
Work plan for wrapping cloth with changing and re-handling operations
Integration Technology
Intelligent systems, so-called robots, cannot be constructed without integrating various elemental technologies. In our laboratory, we are conducting research with a strong awareness of such system integration. For example, we are actively using OpenRTM, an RT-middleware based on the global standard for robot component technology, and SSM (Sensor Sharing Manager), which is widely used in mobile robot research, to build a system with a clear structure that is easy to reuse.
We are building a system that has a clear structure and is easy to reuse. In addition, we are not only using these tools, but also researching and developing middleware and necessary tools, as well as contributing to standardization.
In addition, by conducting systematic research on the motions (skills) required for intelligent robots to perform tasks (including movement), we aim to provide highly reusable technology that enables robots to perform tasks even if the robots and tasks are different, rather than simply creating robots that perform a single motion.
RT middleware
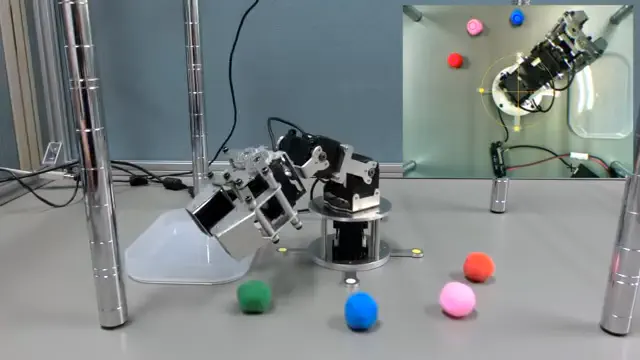
Cleaning up colored balls by robot
RTCs for indoor service robots
Observation of human behavior
As humans and robots interact with each other, it will become essential for robots to observe and understand human behavior. This is because robots are required to understand what humans are doing or what they want to do by observing human behavior, and to take appropriate actions based on this understanding. In this laboratory, we observe human behavior
In this laboratory, we are working to develop intelligent systems that can observe human behavior and imitate it, or understand human intentions and provide support.
Research Poster (in Japanese)

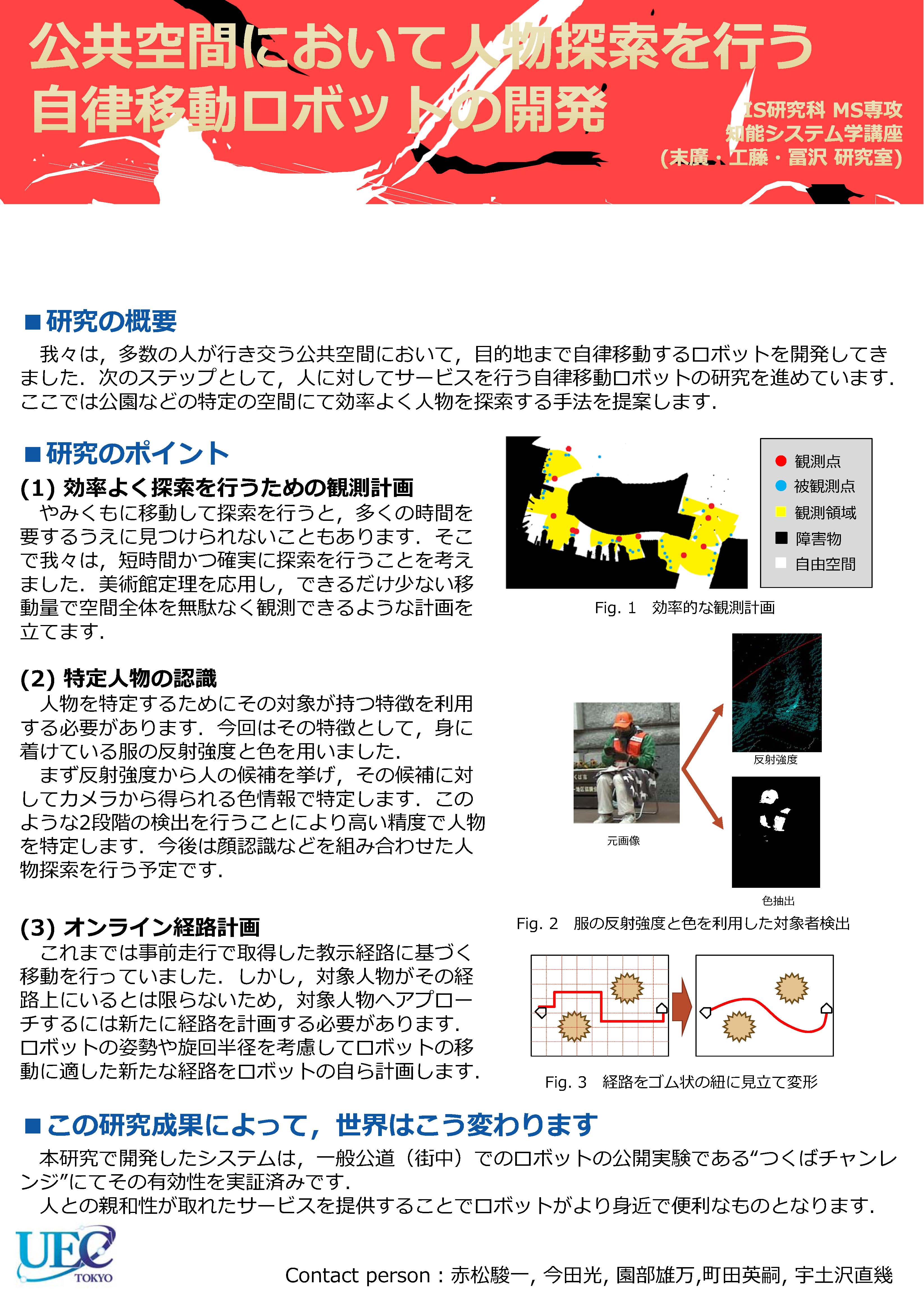
Autonomous Mobile Robot
This is previous research. We do not research it now.
Even if we are visiting a place for the first time, as long as we have a map, we can determine where we are and how to get to our destination. Robots that provide physical services are required to have the same intelligence as humans. In this laboratory, we are conducting research to develop an intelligent system that can accurately understand itself and its surroundings, and can move to any location, regardless of whether it is indoors or outdoors, in a realistic environment where many humans coexist.
Research Poster (in Japanese)