形態変化する登攀ロボット
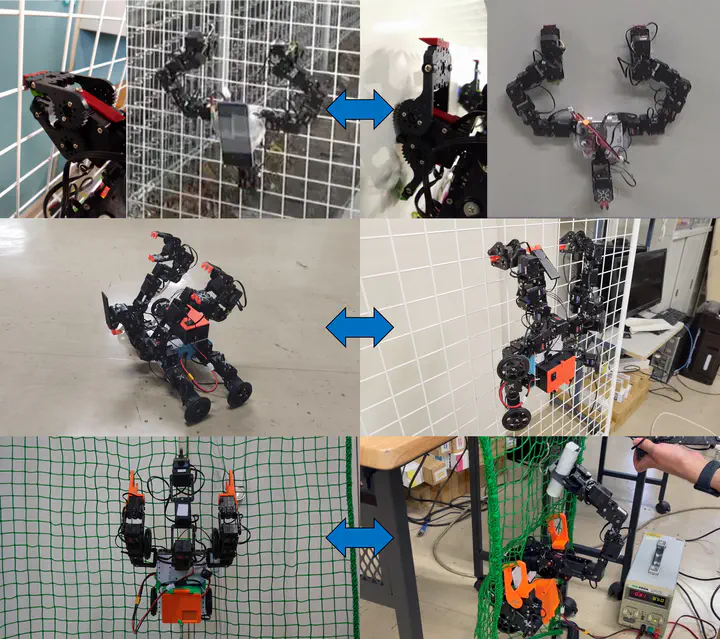
形態変化を活用して,登攀ロボットの移動範囲を拡大することに取り組んでいます.
フェンスと壁面の登攀
グリッパと吸盤を切り替えるエンドエフェクタを活用して,フェンスと壁面の登攀を両立するロボットを研究しています.様々な条件の鉛直面に対応できる登攀ロボットの実現を目指しています.
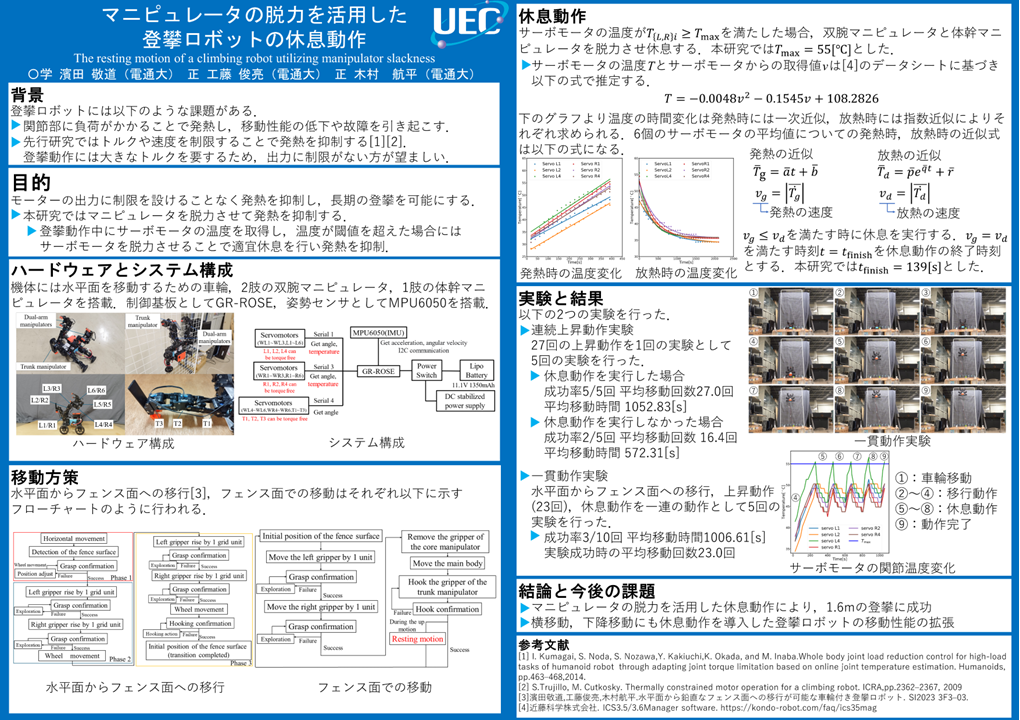
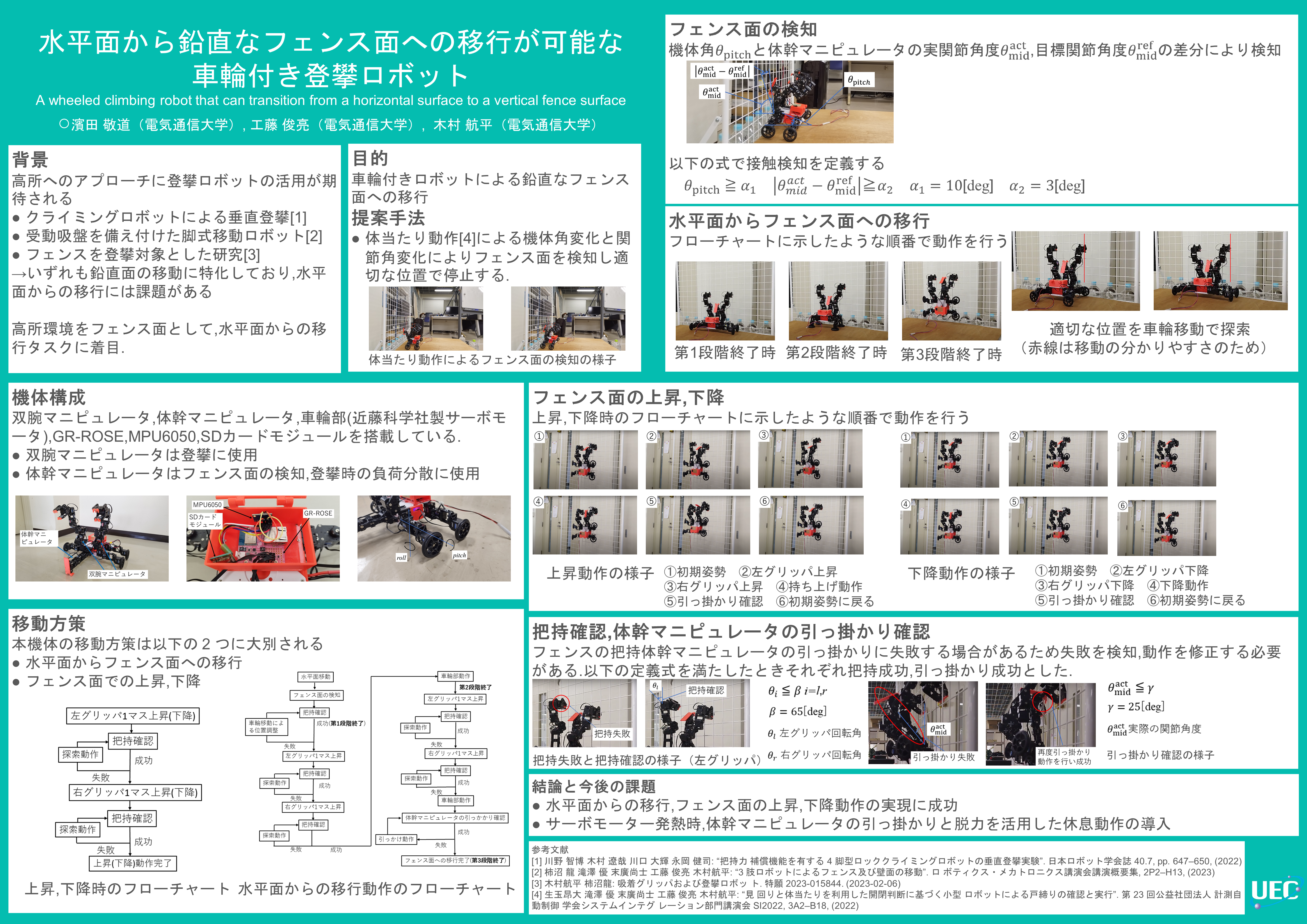
水平面からフェンス面への移行
形態変化を活用して,水平面からフェンス面への移行するロボットを研究しています.これにより,単一のロボットが活動できる範囲を拡大することを目指しています. また登攀ロボットは登攀中の関節部の発熱が激しく,故障や破損が発生するという課題があります.これに対して本研究では,ロボット自身が登攀中の温度上昇時を検知し,休息を取ることにも取り組んでいます.
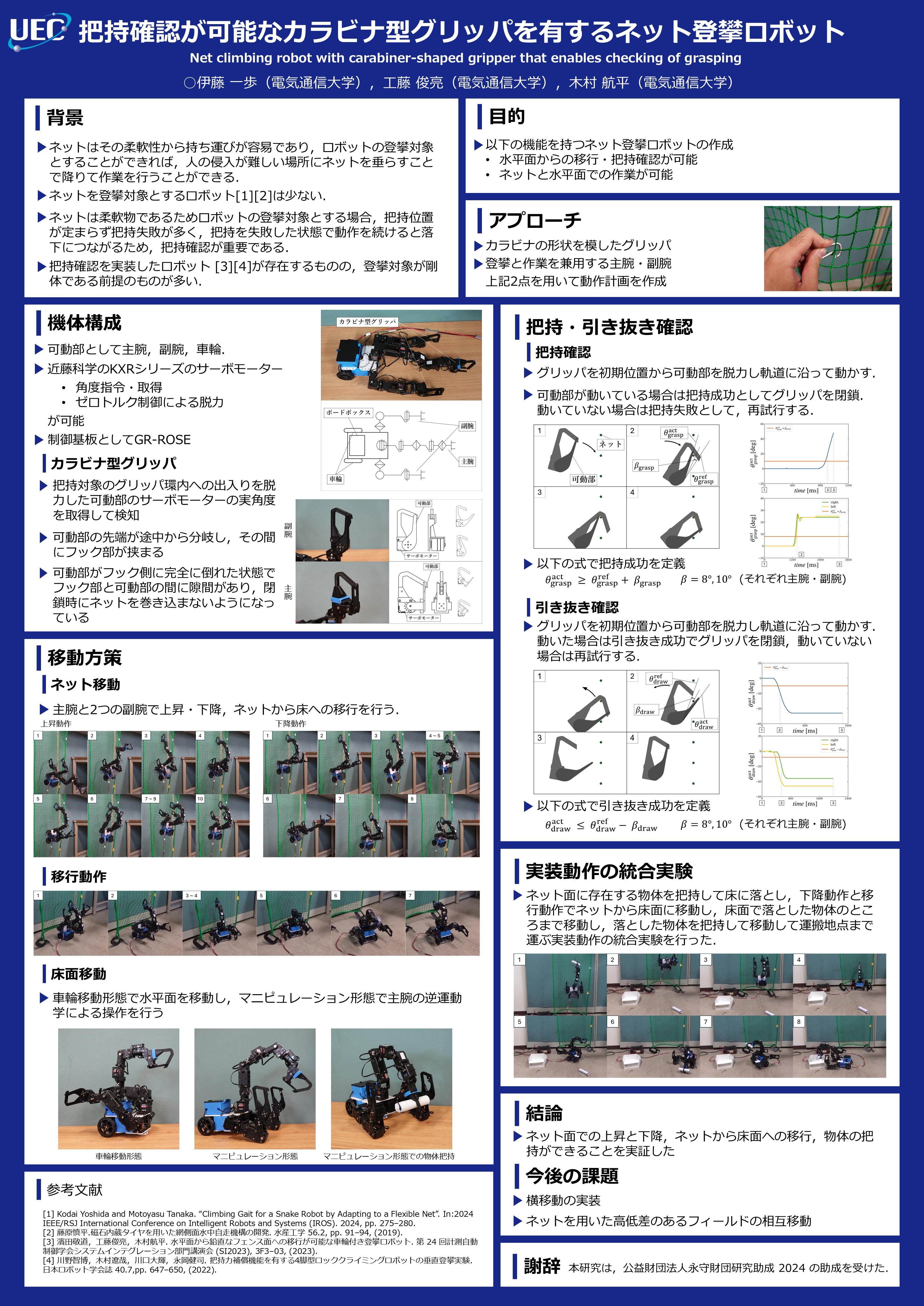
ネットの登攀
鉛直に張られたネットを登攀するロボットを研究しています.ネットは柔軟で不安定であるため,ロボットによる把持,登攀が難しいという課題があります.これに対して,カラビナ型グリッパを開発し,ネットの確実な把持を可能にしました.本研究ではこのグリッパを活用して,水平面と鉛直なネットの移行に取り組んでいます.
動画
フェンスと壁面の登攀
フェンスの登攀
壁面の登攀
屋外実験
屋外実験(別アングル)
水平面からフェンス面への移行+登攀中の休息動作
ネットの登攀
床からネットへの登攀+ネット上の物体の把持
ネットから床への降下+水平面上の物体の把持
研究ポスター
関連文献
-
伊藤 一歩, 工藤 俊亮, 木村 航平. 把持確認が可能なカラビナ型グリッパを有するネット登攀ロボット. 第25回計測自動制御学会システムインテグレーション部門講演会 (SI2024). 2B4-05. 2024.
-
木村 航平. 形態変化する登攀ロボット. 日本ロボット学会誌, Vol. 42 No. 7 pp. 636-641, 2024.
-
濱田 敬道, 工藤 俊亮, 木村 航平. マニピュレータの脱力を活用した登攀ロボットの休息動作. 日本機械学会ロボティクス・メカトロニクス講演会2024 (ROBOMECH2024). 2P1-M09. 2024.
-
濱田 敬道, 工藤 俊亮, 木村 航平. 水平面から鉛直なフェンス面への移行が可能な車輪付き登攀ロボット. 第24回計測自動制御学会システムインテグレーション部門講演会 (SI2023), 3F3-03. 2023.
-
柿沼 龍, 滝澤 優, 末廣 尚士, 工藤 俊亮, 木村 航平. 3肢ロボットによるフェンス及び壁面の移動. 日本機械学会ロボティクス・メカトロニクス講演会2023 (ROBOMECH2023), 2P2-H13. 2023.
-
木村 航平,柿沼 龍.吸着グリッパおよび登攀ロボット.特願2023-015844.2023/02/06.