形態変化ロボット
実世界の様々な環境にロボットが適応していくために,多様な形態に変化できるロボットの研究に取り組んでいます.
人間が2本の脚を巧みに使って階段を登ったり,長距離を効率よく移動する目的で乗り物を活用するように,ロボットにおいても多様な形態へと遷移できる能力は重要になります.
特に,人間では難しいバランスが要求される形態にも変化できる能力を秘めています.
研究キーワード
知能ロボティクス,形態変化,制御,ロボットソフトウェア,ヒューマノイド,脚車輪ロボット 等
研究テーマ例
- 脚,腕,車輪を複合的に活用して多様な形態に変化できるロボットの研究
- 不安定なロボットにおけるバランス制御の研究
- ロボットによる搭乗型道具(乗り物)の利用操作と移動の研究
動画
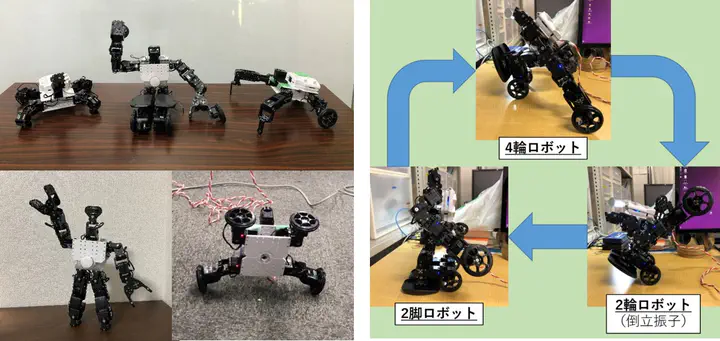
形態変化(4輪,2輪倒立振子,2脚)
転倒状態からの復帰動作(起き上がり動作)
倒立振子制御での目標角を探索する自動形態変化
姿勢変化に対応した倒立振子制御
ロボットに乗るロボット(休みながら移動)
関連文献
- 佐藤 裕弥, 木村 航平, 岡田 慧, 稲葉 雅幸. 倒立振子への状態遷移が可能な小型ヒューマノイドの転倒復帰機能を利用した目標角の自動設定. 第37回日本ロボット学会学術講演会講演論文集, 3L2-07, 2019.
- 真壁 佑, 木村 航平, 服部 未来, 佐藤 裕弥, 菅井 文仁, 垣内 洋平, 岡田 慧, 稲葉 雅幸. 小型多種ロボット構成キットによる4輪走行トランスフォームヒューマノイドの設計と行動実現. 日本機械学会ロボティクス・メカトロニクス講演会'20講演論文集, 2A2-G14, 2020.
- Tasuku Makabe, Naoki Hiraoka, Shintaro Noda, Tomoki Anzai, Kohei Kimura, Mirai Hattori, Hiroya Sato, Fumihito Sugai, Yohei Kakiuchi, Kei Okada, Masayuki Inaba. Design and development for humanoid-vehicle transformer platform with plastic resin structure and distributed redundant sensors. In Proceedings of The 2022 IEEE International Conference on Robotics and Automation (ICRA2022), pp. 8526-8532, 2022.