Transformable Robot
In order for robots to adapt to various environments in the real world, we are conducting research on robots that can change into various forms.
Just as humans skillfully use their two legs to climb stairs and utilize vehicles for the purpose of efficiently traveling long distances, the ability of robots to transition to various forms is important.
In particular, it has the ability to change into forms that require a balance that is difficult for humans.
Research keywords
Intelligent robotics, Transformation, Control, Robot software, Humanoid robot, Leg-wheel robot, etc.
Research themes
- Research on robots that can change into various forms by utilizing legs, arms, and wheels in a complex manner.
- Research on balance control of unstable robots.
- Research on manipulation and locomotion of boarding tools (vehicles) by robots.
Videos
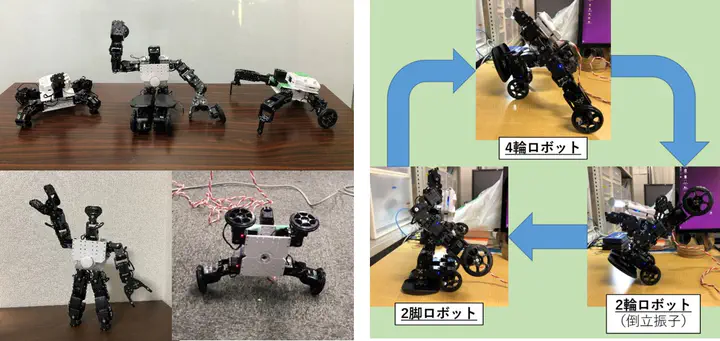
Transformation between 4-wheels, 2-wheels-inverted-pendulum, and 2-legs
Recovery from fall states (Getting up)
Automatic transformation to search for target angle in inverted pendulum control
Inverted pendulum control corresponding to posture changes
Robot riding a robot (moving while resting)
Related works
- Tasuku Makabe, Naoki Hiraoka, Shintaro Noda, Tomoki Anzai, Kohei Kimura, Mirai Hattori, Hiroya Sato, Fumihito Sugai, Yohei Kakiuchi, Kei Okada, Masayuki Inaba. Design and development for humanoid-vehicle transformer platform with plastic resin structure and distributed redundant sensors. In Proceedings of The 2022 IEEE International Conference on Robotics and Automation (ICRA2022), pp. 8526-8532, 2022.
Related works (in Japanese)
- 佐藤 裕弥, 木村 航平, 岡田 慧, 稲葉 雅幸. 倒立振子への状態遷移が可能な小型ヒューマノイドの転倒復帰機能を利用した目標角の自動設定. 第37回日本ロボット学会学術講演会講演論文集, 3L2-07, 2019.
- 真壁 佑, 木村 航平, 服部 未来, 佐藤 裕弥, 菅井 文仁, 垣内 洋平, 岡田 慧, 稲葉 雅幸. 小型多種ロボット構成キットによる4輪走行トランスフォームヒューマノイドの設計と行動実現. 日本機械学会ロボティクス・メカトロニクス講演会'20講演論文集, 2A2-G14, 2020.