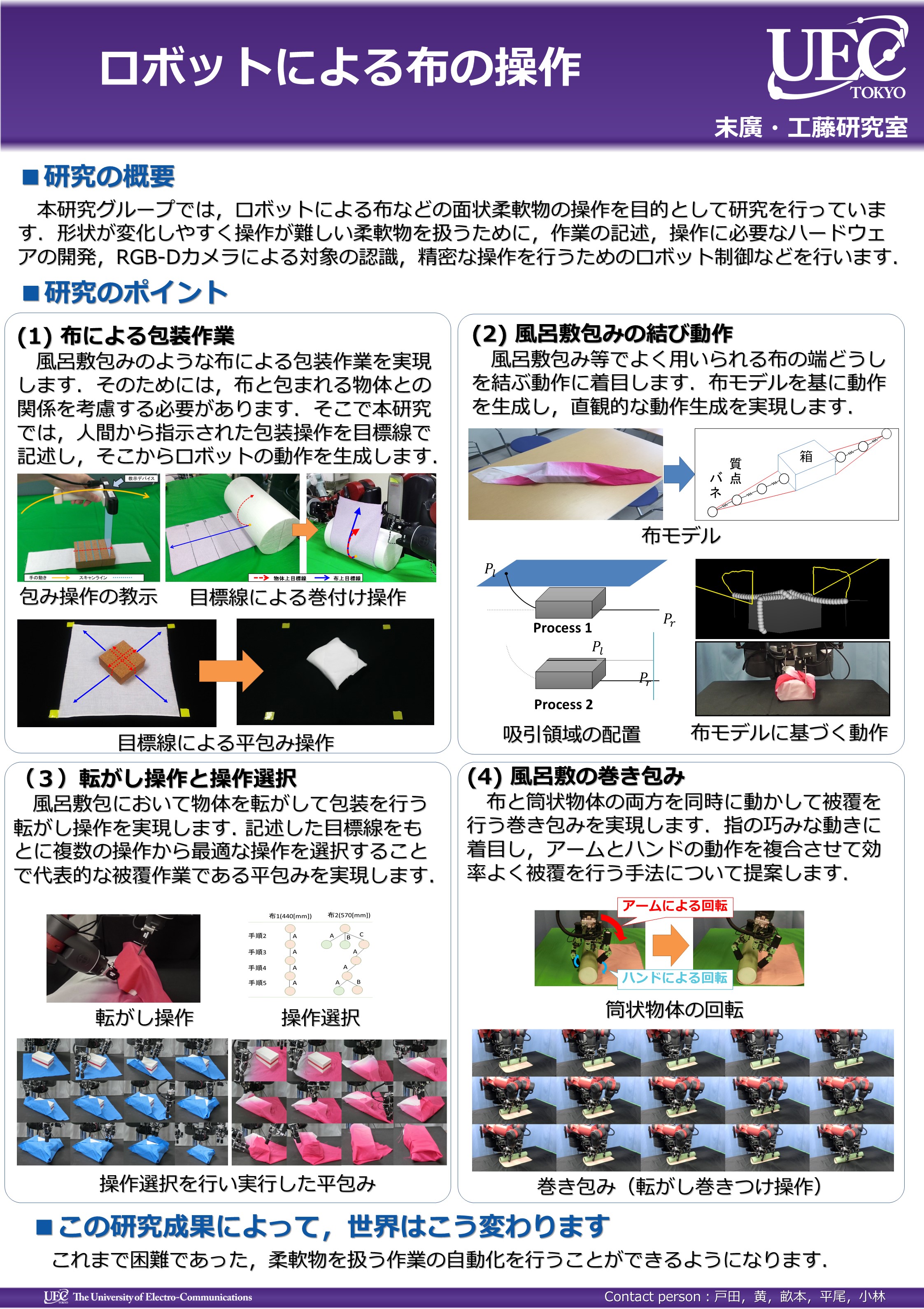
Cloth Manipulation
This research group is studying the manipulation of flexible surface objects such as cloth by robots. In order to handle flexible objects that are easily changeable in shape and difficult to manipulate, we are describing the tasks, developing the hardware necessary for manipulation, recognizing the object with an RGB-D camera, and controlling the robot to perform precise manipulation.
Research Poster (in Japanese)
Videos
- Work plan for wrapping cloth with changing and re-handling operations
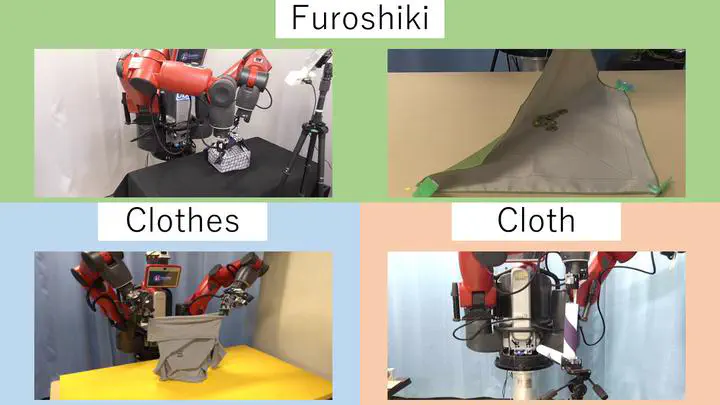
- Tie a furoshiki
- Manipulate cloth to bring coins on the cloth to the center
- Untie a knot in a furoshiki
- Fold the hem of clothes