Cooking Robot
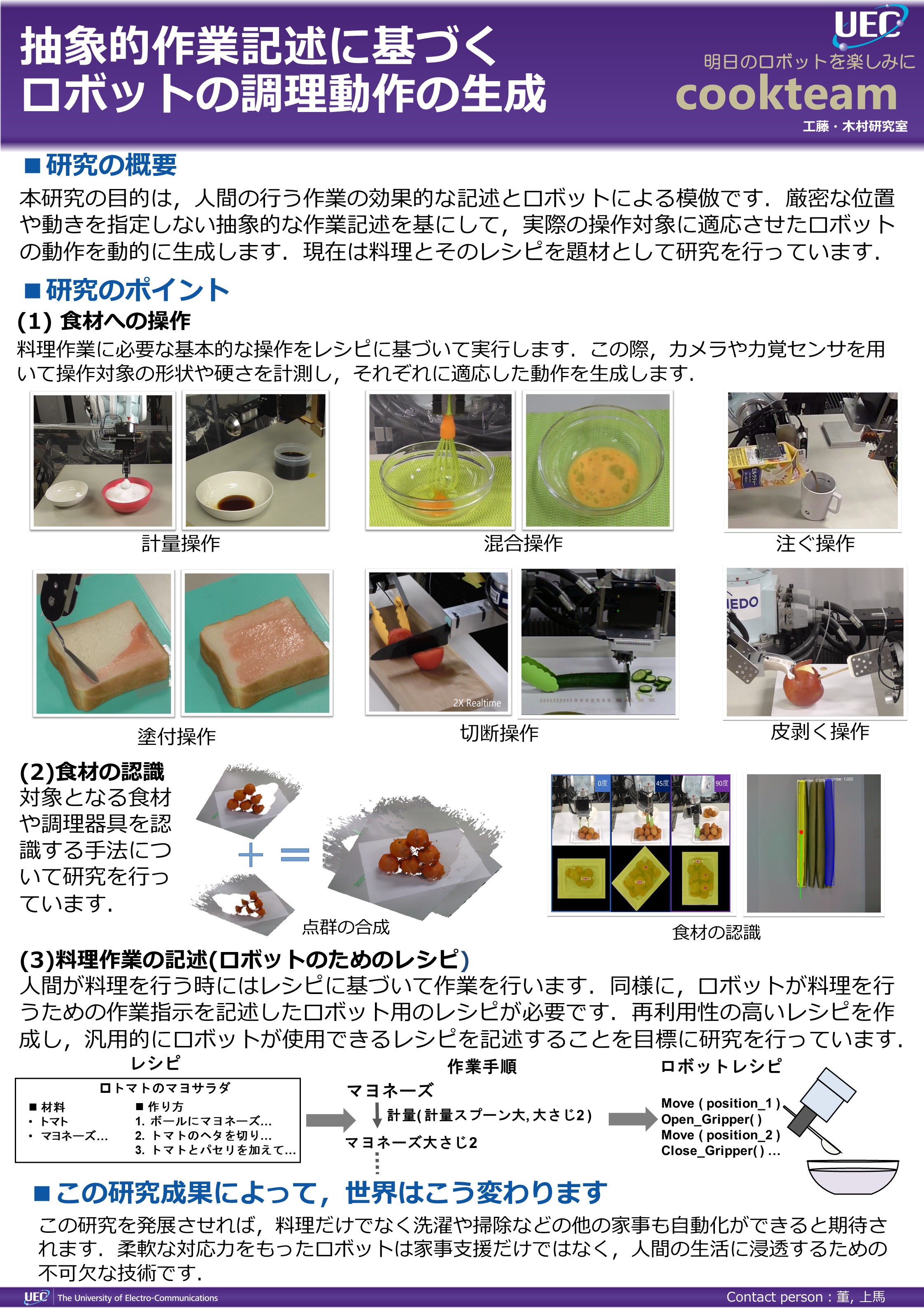
The goal of this research is the effective description and robotic imitation of human tasks. Based on abstract task descriptions that do not specify exact positions or movements, we dynamically generate robot behaviors that are adapted to the actual target of manipulation. Currently, we are working on the subject of cooking and its recipes.
Resarch Poster (in Japanese)
Videos
- Cutting of various vegetables
- Making salad dressing
- Making sandwiches
- Precision pour skill for service robot with unknow containers
- Peeling apples
- Food skewering operation
- Bin picking of fried chicken using deep learning
- Creation of salads with multiple cooking operations
- Cut cucumbers into large chunks
- Rolling motion for making dumplings
Cutting of various vegetables
Making salad dressing
Making sandwiches
Precision pour skill for service robot with unknow containers
Peeling apples
Food skewering operation
Bin picking of fried chicken using deep learning
Creation of salads with multiple cooking operations
Cut cucumbers into large chunks
10x speed