Rope Manipulation
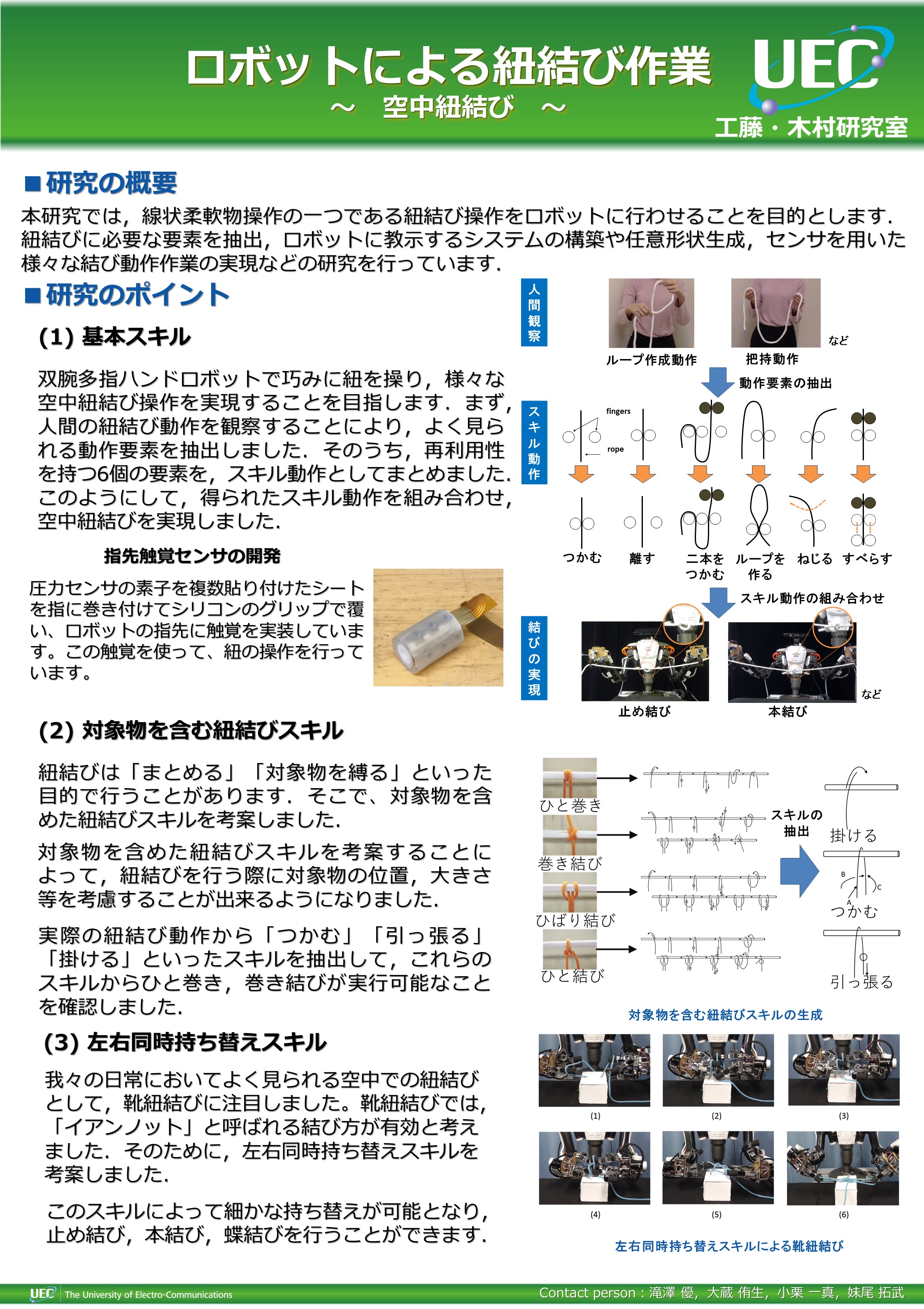
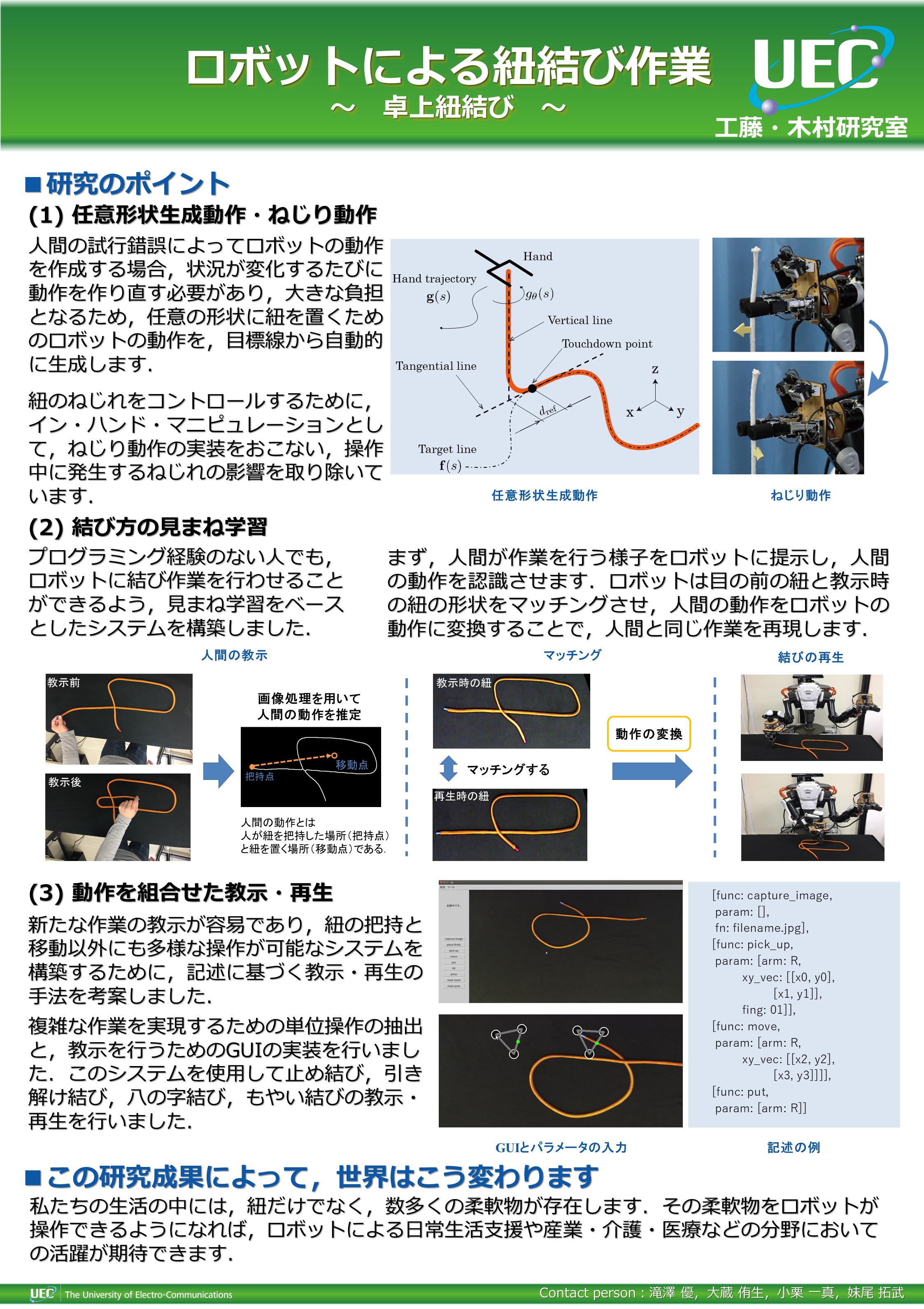
This research group aims to have a robot perform the knotting operation, which is one of the line flexible object manipulation operations. We are studying the extraction of elements necessary for knotting, construction of a system to teach the robot, generation of arbitrary shapes, and realization of various knot-tying operations using sensors.
Research Poster (in Japanese)
Videos
A multi-DOF hand and basic motions
- Collision avoidance using multiple DOFs
- In-air knotting using recognition
- Laerning from Demonstration of tabletop knotting
- Knotting using the simultaneous transfer skill