紐のマニピュレーション
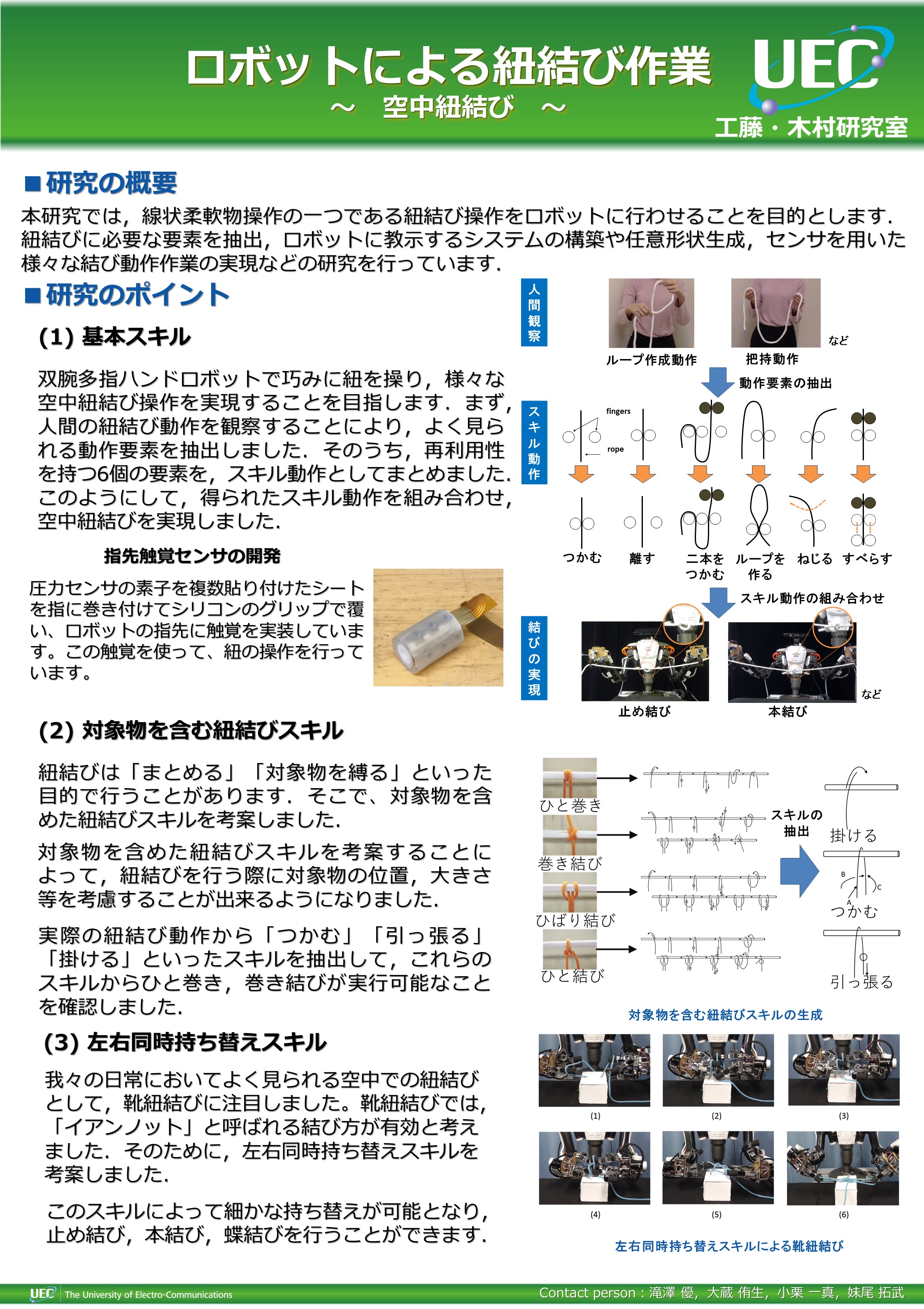
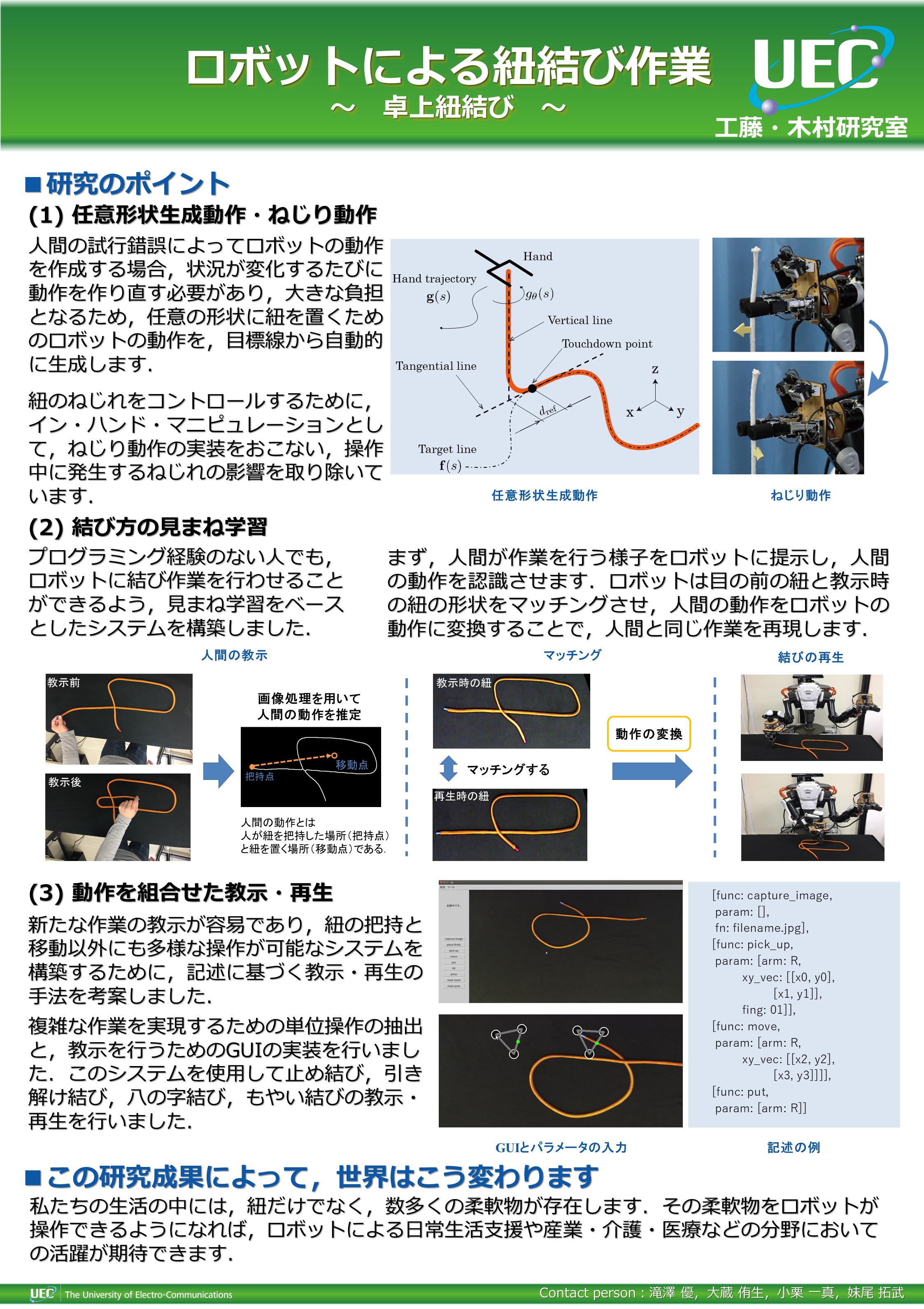
本研究グループでは,線状柔軟物操作の一つである紐結び操作をロボットに行わせることを目的としています.紐結びに必要な要素の抽出,ロボットに教示するシステムの構築や任意形状生成,センサを用いた様々な結び動作作業の実現などの研究を行っています.
研究ポスター
動画
多自由度ハンドと基本動作
- 多自由度を用いた衝突回避
- 認識を利用した空中紐結び
- 卓上紐結びの見まね学習
- 同時持ち替えスキルを使った結び方
本研究グループでは,線状柔軟物操作の一つである紐結び操作をロボットに行わせることを目的としています.紐結びに必要な要素の抽出,ロボットに教示するシステムの構築や任意形状生成,センサを用いた様々な結び動作作業の実現などの研究を行っています.