電通大で現在行っている研究は,電通大 工藤・木村研究室のページをご覧下さい.以下は,電通大赴任以前に行っていた研究です.
ぐらつく床や一輪セグウェイの上でバランスをとる制御
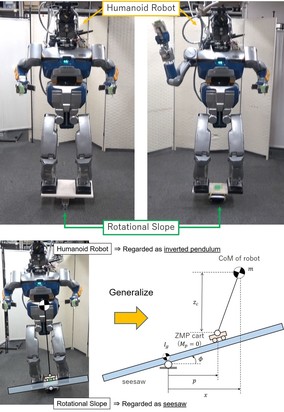
本研究は,ヒューマノイドロボットが実世界で活動するために必要不可欠な不安定性の解消を図ることを目的とした研究です. 不安定な足場環境においてロボットのみのバランス安定化に限らず,ロボットが搭乗する不安定な環境に対しても同時に安定化を実現する新たな拡張型バランス安定化制御の考え方を示しています.
拡張型バランス安定化制御を実現するための方策として,ロボットが搭乗する環境を回転傾斜面と定義してヒューマノイドロボットと回転傾斜面をそれぞれ倒立振子とシーソーに表現したシーソー・倒立振子モデルとして一般化したことで,異なる環境においても共通に適用可能な枠組みとなっています.
これにより,ぐらつく床だけでなく一輪セグウェイのようなバランス維持が要求される搭乗型の移動機器もヒューマノイドロボットが扱えるようになったことを等身大のロボット実機を用いた実験として実証しています.
- 動画: ぐらつく床の上でバランスをとる(外乱あり)
- 動画: ぐらつく床を水平に安定化させる
- 動画: 一輪セグウェイに乗って移動する
- 動画: 一輪セグウェイの上で手を振る
- 動画: 一輪セグウェイに乗った状態でバッグを持たせる
-
Kohei Kimura, Kei Okada, Masayuki Inaba.
Extended balance stabilization control for humanoid robot on rotational slope based on seesaw-inverted-pendulum model.
Advanced Robotics, Vol. 35 No. 18 pp. 1116-1130, 2021.
-
木村 航平, 岡田 慧, 稲葉 雅幸.
シーソー・倒立振子モデルに基づくヒューマノイドロボットの回転傾斜面における拡張型バランス安定化制御.
第26回ロボティクスシンポジア予稿集, pp. 165-168, 2021.
計測自動制御学会システムインテグレーション部門研究奨励賞
受動車輪を活用した遊脚の存在しない二脚ロボットの移動
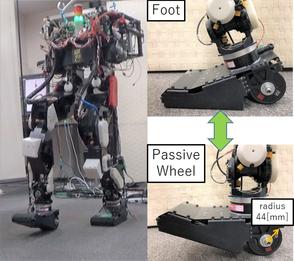
本研究では,二脚ロボットの足部に受動車輪を取り付けて活用することで遊脚の存在しない移動法を確立しました. これにより,移動時における支持多角形の拡張に基づく安定性,障害物に対するロバスト性と転倒しないための緊急停止性,横方向への揺動を抑制した環境適応性の効果が得られました.
脚と車輪で形成された支持多角形に重心をどのように投影させれば最適となるかを解く安定余裕最大化と,事前計画では困難な実環境での転倒要因に対する転倒防止機能を提案したことで,脚車輪型ロボットの行動実現を拡張しました.
-
Kohei Kimura, Noriaki Imaoka, Shintaro Noda, Yohei Kakiuchi, Kei Okada, Masayuki Inaba.
Locomotion approach of bipedal robot utilizing passive wheel without swing leg based on stability margin maximization and fall prevention functions.
ROBOMECH Journal, Vol. 7 No. 35 pp. 1-19, 2020.
-
木村 航平, 今岡 紀章, 野田 晋太朗, 垣内 洋平, 岡田 慧, 稲葉 雅幸.
安定余裕最大化と転倒防止機能に基づく二脚ロボットの受動車輪を活用した遊脚の存在しない移動法.
第25回ロボティクスシンポジア予稿集, pp. 190-193, 2020.
日本ロボット学会 第10回ロボティクスシンポジア研究奨励賞
二輪セグウェイに乗り込んで運転するロボット
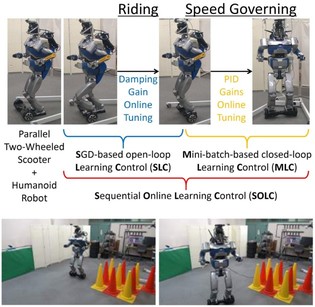
バランス維持も考慮に入れたロボットによる搭乗型道具の利用獲得を目的として,本研究では搭乗型道具自体にバランス補正の機能を部分的に含んだ乗り物の運転操作行動に着目しています. 研究の中では,平行二輪電動スクーター(二輪セグウェイ)の上でロボットが自らの速度を調整するためのPID制御のゲインチューニングに対するオンライン学習制御系を提案しています.
最終的な成果として,学習結果を利用することでロボットによる二輪セグウェイの運転操作行動を実現しました.
また,ロボットの搭乗型道具への適応の過程において,床面から二輪セグウェイへの乗り込み動作も含めた一連の逐次オンライン学習制御法も提案しています. 乗り込み動作では,ロボットが立つ床面の環境と二輪セグウェイ上の環境の間でプロパティが変化することから,その変化に対応するための適応的なゲインチューニングが課題となります. この課題に対して,ロボットの足部まわりのダンピング制御系のゲインを瞬時的な乗り込み動作の期間で即応的に調節する学習制御法を新たに提案したことで解決を図りました.
-
木村 航平, 溝花 弘登, 野沢 峻一, 岡田 慧, 稲葉 雅幸.
制御実行中にオンラインでPIDゲインをチューニングする学習制御に基づく等身大ヒューマノイドロボットの平行二輪電動スクーター上での調速行動.
日本機械学会論文集, Vol. 84 No. 864 pp. 18-00032, 2018.
日本機械学会賞(論文) -
Kohei Kimura, Shunichi Nozawa, Hiroto Mizohana, Kei Okada, Masayuki Inaba.
Riding and speed governing for parallel two-wheeled scooter based on sequential online learning control by humanoid robot.
In Proceedings of The 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS2018), pp. 7997-8004, 2018.
ロボットによる双腕双脚を活用した三輪車の運転操作

ロボットが搭乗型道具を操作するために必要なペダルの脚マニピュレーションとハンドルの腕マニピュレーションにおける共通戦略を提案しています. 本研究では,ヒューマノイドロボットによる双腕双脚を活用した三輪車の操作タスクに焦点を当てています. ハンドル回しやペダリングといったマニピュレーションだけでなく,搭乗型道具から落ちないようにロボット自身を安定化させる座り直しの動作も導入している点が特長となっています.
さらに,別の駆動形態をもつロボットとして,人間の身体構成により近い腱駆動ロボットを用いたペダリング操作にも焦点を当てています. ペダリング操作は,2本の脚とペダル及びクランクからなる閉ループ系での操作が課題であることから,腱駆動ヒューマノイドロボットの2つの脚機能を能動的な脚と受動的な脚に分担させてこの課題を解決しています. 最終的に,ヒューマノイドロボットの脚部の駆動型式の違いが及ぼす影響について腱駆動と軸駆動で比較を行い,ペダリングの操作力の解析結果を示しています.
-
木村 航平, 野沢 峻一, 垣内 洋平, 岡田 慧, 稲葉 雅幸.
能動機能と受動機能の切替制御システムを備えたヒューマノイドの双腕双脚による三輪車操作行動.
日本ロボット学会誌, Vol. 34 No. 7 pp. 468-477, 2016.
-
木村 航平, 浅野 悠紀, 上月 豊隆, 白井 拓磨, 岡田 慧, 稲葉 雅幸.
能動脚と受動脚の協調システムに基づく腱駆動ヒューマノイドによるペダリング操作の実現.
計測自動制御学会論文集, Vol. 52 No. 8 pp. 428-436, 2016.
-
Kohei Kimura, Shunichi Nozawa, Yohei Kakiuchi, Kei Okada, Masayuki Inaba.
Tricycle manipulation strategy for humanoid robot based on active and passive manipulators control.
In Proceedings of The 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS2016), pp. 5797-5804, 2016.
-
木村 航平, 浅野 悠紀, 上月 豊隆, 白井 拓磨, 岡田 慧, 稲葉 雅幸.
能動脚と受動脚の交互協調によるヒューマノイドのペダリング操作と走行の実現.
第15回SICEシステムインテグレーション部門講演会講演概要集, pp. 1194-1197, 2014.
計測自動制御学会システムインテグレーション部門講演会SI2014優秀講演賞