As for my current research topics in UEC, please visit my laboratory's site. The followings are projects that I did before joining UEC.
Regrasping based on tangle topology
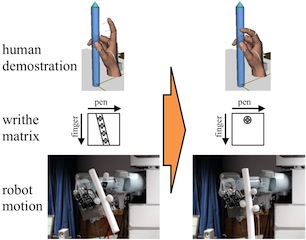
This study proposes a method for imitating human regrasping motion by a robot. The method is based on the learning from observation (LFO) paradigm, in which human motion is recognized by a task model and robot motion is reproduced from the recognized task sequence. For designing a task model for regrasping, we focused on a topological criterion, Gauss linking integral (GLI), which represents a tangle state of two strands. Fingers and an object are represented by strands in this study, and the relationship among them is described in a topological way based on GLI.
- S. Kudoh, P. Vinayavekhin, Y. Sato, K. Ikeuchi, "Imitation of human regrasping motion with a robotic hand based on tangle topology," J. of Robotics Society of Japan, 33(7) pp. 514-523, 2015 (in Japanese).
- P. Vinayavekhin, S. Kudoh, J. Takamatsu, Y. Sato, K. Ikeuchi, "Representation and mapping of dexterous manipulation through task primitives," IEEE Intl. Conf. on Robotics and Automation (ICRA), pp. 3703-3714, 2013.
IROS Workshop "Art and Robots"
In this workshop, we intend to discuss the relationship between art and robotics. Can a robot represent art? If possible, how can this be done? Recently, the use of humanoid robots in the entertainment field has become quite sophisticated. However, because these performances are just replays of predesigned motion, audiences soon become bored with them. Therefore, in order to use a humanoid robot in an entertainment field, it is important to develop a robot that makes a lasting impression on people.
Robot painter
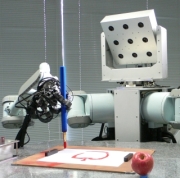
This robot, first, observes a motif using stereo cameras. Next, it considers how to represent the motif as a "picture," and then, draws the picture on a canvas by using a brush grasped by its hand.
The characteristics of this robot is not only that it can manipulate a brush, but also that it considers "what kind of pictures it intends to draw." If the robot only draws as same as an operator instructs, it is not different from a printer or a plotter. In this study, through developing a robot that imitates human drawing behavior as much as possible, we are trying to figured out what humans actually do during drawing something.
- S. Kudoh, K. Ogawara, M. Ruchanurucks, K. Ikeuchi, "Painting robot with multi-fingered hands and stereo vision. Robotics and Autonomous Systems," 57(3), pp. 279-288, 2009.
- Video: drawing an apple by a robot
Robot dancer

In order to preserve Japanese folk dances, which was on the decline due to lack of successors, we are working on capturing Japanese folk dances and representing them by using humanoid robots.
Robots do not dance well when we directly importe human motion to them because robots have different weight and structure of joints from humans. We developed a method for converting human motion to motion that is executable for robots. However, it is not sufficient for dance because the resultant motion is not impressive unless it represents vividness and rhythm of the original dance. Therefore, we developed a method for generating "good" dancing motion by automatically extracting key poses and rhythm of motion from human dance.
- T. Okamoto, T. Shiratori, S. Kudoh, S. Nakaoka, K. Ikeuchi, "Toward a dancing robot with listening capability: Keypose-based integration of lower-, middle-, and upper-body motions for varying music tempos," IEEE Trans. on Robotics, 30(3), pp. 771-778, 2014.
- T. Shiratori, S. Kudoh, S. Nakaoka, K. Ikeuchi, "Temporal scaling of upper body motion for sound feedback system of a dancing humanoid robot," IEEE/RSJ Intl. Conf. on Intelligent Robots and Systems (IROS), pp. 3251-3257, 2007.
- Video: description of our method
Balance maintenance of human-like models with whole-body motion
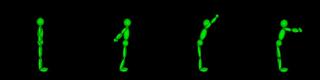
Humans have great skill in balance maintenance. They maintain their balance against unexpected disturbance with whole body motion, such as rotating their arms, bending down, squatting, stepping, and so on. However, these skills have seldom been utilized so far for developing methods of balance maintenance of human-like models.
We developed the method of balance maintenance for human-like models, in which models maintain their balance by whole body motion, such as rotating their arms, bending down, and taking a step, just as humans do. Optimization calculation for joint acceleration is performed, and motion of balance maintenance is generated as the optimal motion to control trajectories of the center of mass of the body (CM) and the zero moment point (ZMP) effectively.
- S. Kudoh, T. Komura, K. Ikeuchi, "Stepping motion for a human-like character to maintain balance against large perturbations," IEEE Intl. Conf. on Robotics and Automation (ICRA), pp. 2661-2666, 2006.
- S. Kudoh, T. Komura, K. Ikeuchi, "The dynamic postural adjustment with the quadratic programming method," IEEE/RSJ Intl. Conf. on Intelligent Robots and Systems (IROS), pp. 2563-2568, 2002.