電通大で現在行っている研究は,電通大 工藤・木村研究室のページをご覧下さい.以下は,電通大赴任以前に行っていた研究です.
タングルトポロジーに基づく持ち替え動作
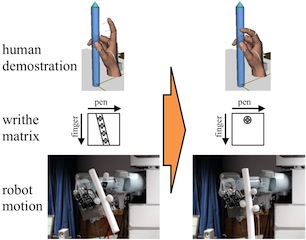
この研究では,人間持ち替え動作をロボットに模倣させています.この研究は,まず人間の動作をタスクモデルとして認識し,その認識結果からロボットの動作軌道を生成するという観察学習パラダイムに基づいています.持ち替え動作のためのタスクモデルとして,ガウスの絡み数を元にしたトポロジカルな指標に注目し,指と物体の関係を複数のひもの絡まりとして表現するモデルを提案しました.これによって,人間とロボットの手の構造の違いに影響されず,指が物体に対してどのような位置にあるのかを大まかに記述することが可能になり,また人間の持ち替え動作をロボットにより模倣することが可能になりました.
- 工藤, ビナヤウェキン, 佐藤, 池内, "タングルトポロジーを用いたロボットハンドによる人間の持ち替え動作の模倣," 日本ロボット学会誌, 33(7), pp. 514-523, 2015.
- P. Vinayavekhin, S. Kudoh, J. Takamatsu, Y. Sato, K. Ikeuchi, "Representation and mapping of dexterous manipulation through task primitives," IEEE Intl. Conf. on Robotics and Automation (ICRA), pp. 3703-3714, 2013.
IROS Workshop "Art and Robots"
本ワークショップは,ロボット工学とアートの関係について議論を深めるのが目的である。 ロボットに芸術的な表現は可能であるか。可能であるとすれば,いかにして可能なのか。 近年,エンターテインメントの分野でのヒューマノイドロボットの利用が大いに進んでいる。 しかしこれらのパフォーマンスのほとんどはあらかじめデザインされた動作のたんなる繰り返しに過ぎず,聴衆はすぐに飽きてしまうのが問題といえる。 ゆえに,より有効なヒューマノイドロボットの利用のためには,人間にずっと感動を与え続けるロボットを開発することが重要になってくる。 ワークショップでは,このようなロボットの可能性について議論を行った。
お絵描きロボット
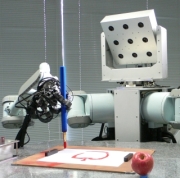
ロボットに絵を描かせる研究です。 ここではロボットはまず描きたい対象を頭部に取り付けられたカメラで観察します。 そしてその特徴を読み取り,どのように「絵」として描くかを考えます。 そして実際に,手で筆を握り絵具を使って絵を描くのです。
このロボットの面白い所は,ただ筆を使いこなすことができるというのではなくて, 「どういう絵を描こうか」と自分で考えるという所です。 人間がこう描けと指示したとおりに絵を描くだけなら,たんなるプリンタで十分です。 そうではなく,ロボットが描きたい対象を見て,まずは3次元的に対象を認識し, 次にどのように2次元の絵として特徴を表現しようかと考えるのが我々のお絵描きロボットの特徴です。
この研究には「人はなぜ絵を描くのか?」というテーマがあります。 我々は「絵を描く」という行為を,人間が行うのと全く同じように行うロボットを作ってみることで, 人間が絵を描く時に本当は何をしているのかを探り出そうとしているのです。
- S. Kudoh, K. Ogawara, M. Ruchanurucks, K. Ikeuchi, "Painting robot with multi-fingered hands and stereo vision. Robotics and Autonomous Systems," 57(3), pp. 279-288, 2009.
- ビデオ: ロボットによるリンゴの描画(2MB)
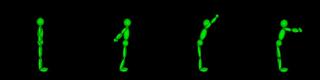
舞踊ロボット

後継者不足などにより失われつつある様々な日本の民俗舞踊を後世に残すため, 舞踊の表す「動き」のモデル化について研究しています。 ここでは人間の動作をモーションキャプチャを使ってコンピュータに取り込み, それを二足歩行ヒューマノイドロボットに再現させました。
人間とロボットでは重さも関節の構造も違うため,人間の動きをそのままロボットに入力しても上手く踊れません。 そこで我々は,人間の動きをロボットにも実現可能な動きに変換する手法を開発しました。 しかしロボットに踊りを踊らせる場合,ただロボットに実現可能な動きにしただけでは不十分で, 動きのキレやリズム感といったものを再現できなければ,つまらない動きになってしまいます。 そこでさらに,人間の踊りから動きの特徴やリズムなどの情報を自動的に取り出し, 踊りとして「上手な」動きをロボットに実現するようにしています。
- T. Okamoto, T. Shiratori, S. Kudoh, S. Nakaoka, K. Ikeuchi, "Toward a dancing robot with listening capability: Keypose-based integration of lower-, middle-, and upper-body motions for varying music tempos," IEEE Trans. on Robotics, 30(3), pp. 771-778, 2014.
- T. Shiratori, S. Kudoh, S. Nakaoka, K. Ikeuchi, "Temporal scaling of upper body motion for sound feedback system of a dancing humanoid robot," IEEE/RSJ Intl. Conf. on Intelligent Robots and Systems (IROS), pp. 3251-3257, 2007.
- ビデオ: 手法の解説
全身動作による人型モデルのためのバランス保持
人間はバランス保持に関してひじょうに優れた能力をもっており, 不意の外乱に対して,腕を回す,腰を屈める,しゃがみ込む,足を踏み出すなどの 全身動作を用いてたくみに対処することができます。 しかしこのようなスキルは,これまでバランス制御のモデルにあまり有効利用されてきませんでした。
この研究では,全身動作を用いたバランス保持動作の生成手法を開発しました。 ここでは腕を回したり腰を屈めたりといった人間が行うような全身動作を適切に用いながら, 人型のモデルのためのバランス保持動作が生成されます。 動作生成には,最適化計算を用いた重心位置とゼロモーメントポイント(ZMP)の位置の制御を行っています。
- S. Kudoh, T. Komura, K. Ikeuchi, "Stepping motion for a human-like character to maintain balance against large perturbations," IEEE Intl. Conf. on Robotics and Automation (ICRA), pp. 2661-2666, 2006.
- S. Kudoh, T. Komura, K. Ikeuchi, "The dynamic postural adjustment with the quadratic programming method," IEEE/RSJ Intl. Conf. on Intelligent Robots and Systems (IROS), pp. 2563-2568, 2002.