UEC Kudoh & Kimura Lab
UEC Kudoh & Kimura Lab
About Us
Members
Projects
Publications
Access
Light
Dark
Automatic
English
日本語
Projects
Morphoging Climbing Robot
We are conducting research using a three-limbed small robot to move around fencesm, walls and horizontal plane with the same machine.
Cooking Robot
We study the subject of cooking and its recipes.
Rope Manipulation
This research group aims to have a robot perform the knotting operation, which is one of the line flexible object manipulation operations.
Cloth Manipulation
This research group is studying the manipulation of flexible surface objects such as cloth by robots.
Stair-climbing robot for cleaning treads and risers
This study have been working on cleaning treads and risers by stair-climbing robot.
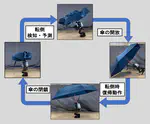
Shock mitigation and recovery motion for a falling robot utilizing a folding umbrella
This study have been working on a mechanism to mitigate the impact of fall over by attaching a folding umbrella.
Tidying up robot equipped the manipulator with bag
This study have been working on tidying up by mobile robot having the manipulator with bag.
Compact Door Closing Robot
A small robot is used for a door closing task.
Transformable Robot
In order for robots to adapt to various environments in the real world, we are conducting research on robots that can change into various forms.
Entertainment Robot
We are conducting research on entertainment robots that aim to entertain humans. As a part of our research, we aim to develop a robot system that can play air field hockey.
»
Cite
×