UEC Kudoh & Kimura Lab
UEC Kudoh & Kimura Lab
About Us
Members
Projects
Publications
Access
ライト
ダーク
自動
日本語
English
Projects
形態変化する登攀ロボット
3肢小型ロボットにてフェンス面,壁面,水平面を同一機体で移動する研究を行っています。
料理ロボット
料理とそのレシピを題材として研究を行っています.
紐のマニピュレーション
本研究グループでは,線状柔軟物操作の一つである紐結び操作をロボットに行わせることを目的としています.
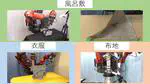
布のマニピュレーション
本研究グループでは,ロボットによる布などの面状柔軟物の操作を目的として研究を行っています.
階段の踏板・蹴込板を清掃するロボット
階段の踏板と蹴込板を清掃するロボットの研究に取り組んでいます.
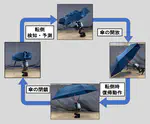
折り畳み傘を活用した転倒時の衝撃緩和機構を備えたヒューマノイドロボット
折折り畳み傘を備えた小型ヒューマノイドロボットの転倒時の衝撃緩和機構の実現に取り組んでいます.
袋付きマニピュレータを備えた片付けロボット
マニピュレータに袋を取り付けることで,移動ロボットによる片付けを効率的に行うことを目指しています.
小型戸締りロボット
小型ロボットを用いてドアの戸締りタスクに取り組んでいます。
形態変化ロボット
実世界の様々な環境にロボットが適応していくために,多様な形態に変化できるロボットの研究に取り組んでいます.
エンターテインメントロボット
人間を楽しませることを目的としたエンターテイメントロボットに関する研究を進めています.我々はその一環としてエアホッケーをプレイするロボットシステムの開発を目指しています.
»
引用
×